ربات انسان نمای تویوتا در واقع یک ربات نسل سوم با ۱٫۵ متر قد، سنگینی ۷۵ کیلوگرم و ۳۲ درجهی آزادی چرخشی است که در دستان خود ۱۰ انگشت دارد. T-HR3 به خوبی تعادل خود را حفظ میکند و با مداخلهی یک کاربر انسانی هدایت میشود. این ربات حرکات هدایت کنندهی خود را تقلید میکند. برای آشنایی بیشتر با T-HR3 با مجلهی فناوریهای توان افزا و پوشیدنی همراه باشید.

T-HR3 و نمایش حرکات انسان
مانند بسیاری از شرکتهای بزرگ ژاپن که در زمینهی رباتیک فعال هستند، تویوتا پیش از آماده شده این محصول این طرح را آشکار نکرده بود. در بیانیهی تویوتا برای معرفی T-HR3 مسئول طراحی و توسعهی بستر نرم افزاری ربات بخش Partner Robot Division از شرکت تویوتا بوده است. این بستر از امنیت برهم کنش ربات با محیط اطراف اطمینان حاصل میکند. این ربات کارایی فناوریهای پیشرفته برای دستیابی به بخش کوچکی از حرکت بدن انسان را نشان میدهد.
ربات های انسان نمای شرکت تویوتا
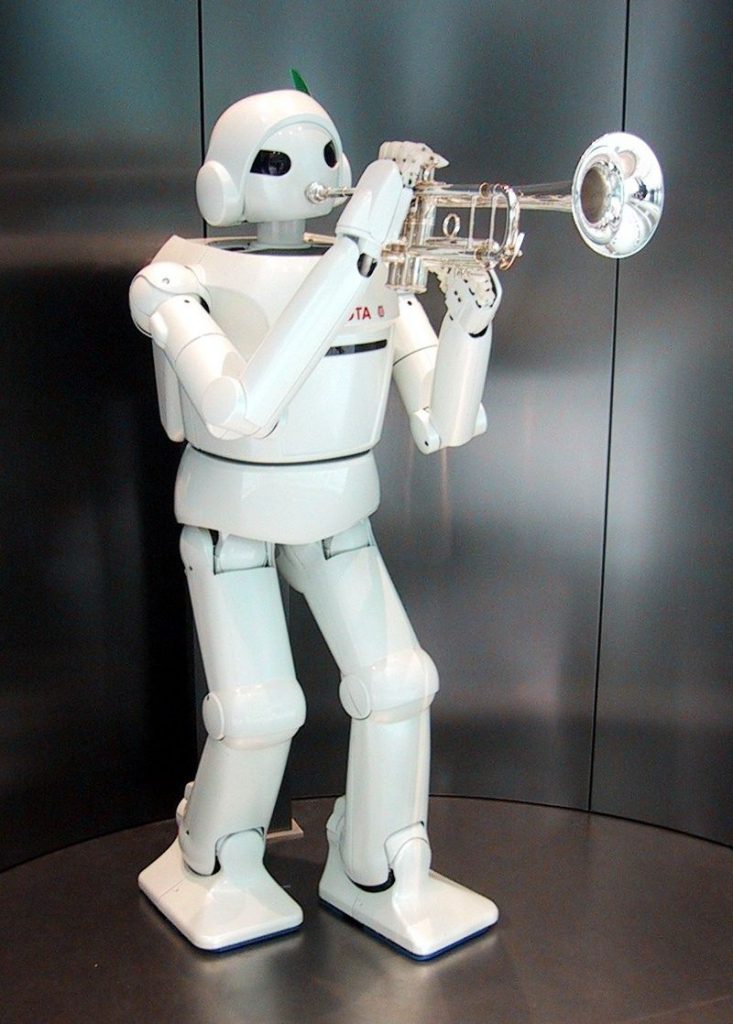
برای فهم عبارت نسل سوم باید به رباتهای پیشین تویوتا نگاه کنیم. نخستین ربات انسان نمای این شرکت یک ربات نوازنده بود که ترومپت مینواخت.
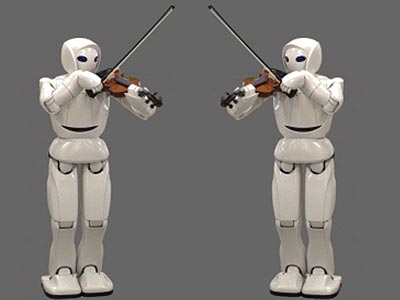
دومین ربات انسان نمای تویوتا ویولون میزد و پاهای عضلانیتر و طراحی جالبتری در قسمت سر داشت.
ربات بعدی مکانیزم کاملا متفاوتی در پاها داشت. در قسمت پشت یک باتری بزرگ قرار داشت که امکان مانورهای دینامیکی پیچیدهتری را فراهم مینمود.

و در گام بعد، پس از معرفی بستر نرم افزاری رباتهای انسان نما، ربات T-HR3 است که با درجات آزادی فراوان حرکتهای انعطافپذیری را به نمایش میگذارد.
برنامهی تویوتا معرفی کامل این ربات در International Robotic Exhibition در توکیو بود که در سال ۲۰۱۹ انجام شد. از آخرین به روز رسانی این ربات میتوان به بهینه سازی الگوریتم راه رفتن ربات اشاره کرد. یکی دیگر از به روزرسانیها سامانهی Master Hand است که امکان انجام حرکات ظریف در دست را فراهم میکند. همچنین کاهش وزن پاها و دستان سامانهی هدایتی، هدایت آن از راه دور را سادهتر نموده است.

بازخورد لمسی نیز تجربهی هدایت را واقعیتر میسازد. اگر با شخصی دست دهید، برخورد انگشتان وی را احساس خواهید کرد. راه رفتن با این سامانه هرچند مانند راه رفتن عادی نیست، اما کاربر بدون صرف نیروی ذهنی و احساس بار اضافهی روی مغز قادر به کنترل ربات است.
چرا ربات های انسان نما
اگر به تصویر آیندهی رباتها دفت کنیم، رباتهایی که با محیط برهم کنش دارند به ذهن میرسد. این برهم کنش باید امن باشد. در آینده تقاضا برای رباتهایی که از تعداد زیادی مفصل برای انجام امور ظریف استفاده میکنند، زیاد خواهد بود. به عبارت دیگر درجات آزادی بسیار نیاز است. به همین دلیل این ربات انسان نما به عنوان یک سامانهی مهم ساخته شده است تا تصویری از رباتهای آینده باشد. طراحی این ربات به گونهای است که اگر یکی از مفاصل به دلیل به شکل دلخواه حرکت نکند – کارکرد آن به طریقی مختل شود – انجام این حرکت با ترکیب دیگری از حرکات مفصل ممکن است.
معمولا گفته میشود که شکل ربات انسان نما برای انجام اموری که انسان انجام میدهد، مناسبتر است. ولی در حقیقت شکل یک ربات انسان نما کنترل آن را توسط کاربر انسانی سادهتر میسازد.
بیشتر بخوانیم:
ربات های آشپز در رستوران های جهان
ساخت حشره رباتیک نرم با عضلات مصنوعی
منبع: global.toyota
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


