گروهی از پژوهشگران روش جدیدی برای کنترل اسکلت بیرونی اندام تحتانی با استفاده از یادگیری تقویتی عمیق ایجاد کردند. روشی با عنوان “کنترل راه رفتن اسکلت بیرونی توانبخشی اندام تحتانی همراه با یک مدل اسکلتی عضلانی از طریق یادگیری تقویتی عمیق” منتشر شده در مجله مهندسی عصبی و توانبخشی، کنترل قویتر و طبیعی راه رفتن را برای کاربران اسکلت بیرونی اندام تحتانی امکانپذیر میکند. برای آشنایی بیشتر با این روش با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
ضرورت ایجاد یک سامانه کنترلی قوی
در حالی که پیشرفتها در رباتیک پوشیدنی به بازیابی تحرک افراد مبتلا به اختلالات اندام تحتانی کمک کرده است، روشهای کنترلی کنونی اسکلتهای بیرونی، توانایی ارائه حرکات طبیعی برای کاربران را ندارند. اسکلتهای بیرونی حرکات طبیعی محدودی ایجاد میکنند. این میتواند تعادل را به خطر بیندازد و سبب خستگی و ناراحتی کاربر شود. مطالعات اندکی بر روی توسعه کنترلرهای قوی متمرکز شدند. روشهای کنترلی که میتوانند تجربه کاربر را از نظر ایمنی و استقلال بهینه کنند.
به گفته Ghaith Androwis، دانشمند پژوهشی ارشد در مرکز تحقیقات مهندسی تحرک و توانبخشی در بنیاد کسلر و مدیر آزمایشگاه رباتیک و تحقیقات توانبخشی: اسکلتهای بیرونی موجود برای توانبخشی اندام تحتانی از فناوریهای مختلفی برای کمک به کاربر برای حفظ تعادل استفاده میکنند، از جمله عصاها و حسگرهای ویژه. اسکلتهای بیرونی که بدون چنین کمککنندههایی کار میکنند، راه رفتن مستقلتری را امکانپذیر میکنند، اما به قیمت اضافه وزن و سرعت پایین راه رفتن.
یادگیری تقویتی عمیق و بهبود کنترل اسکلت بیرونی
دکتر Androwis میگوید: «سامانههای کنترلی پیشرفته برای ایجاد اسکلت بیرونی اندام تحتانی که راه رفتن مستقل را تحت طیف وسیعی از شرایط ممکن میکند، ضروری است. روش جدید این گروه از یادگیری تقویتی عمیق برای بهبود کنترل اسکلت بیرونی استفاده میکند. یادگیری تقویتی نوعی هوش مصنوعی است که ماشینها را قادر میسازد از تجربیات خود از طریق آزمون و خطا بیاموزند».
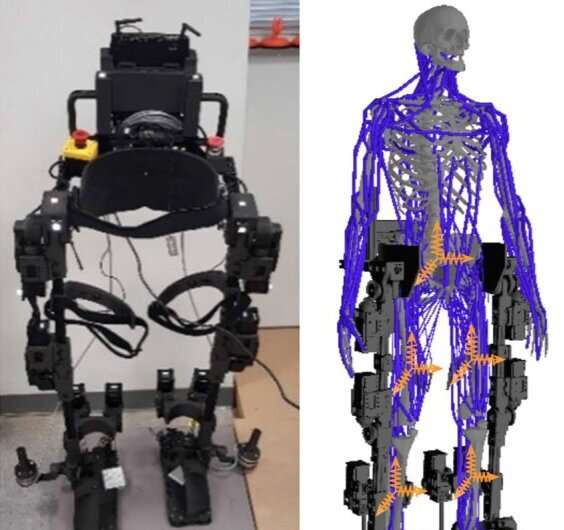
Xianlian Zhou، استادیار و مدیر آزمایشگاه BioDynamics در بخش مهندسی زیست پزشکی در مؤسسه فناوری نیوجرسی و نویسنده این مقاله، توضیح داد: «با استفاده از یک مدل اسکلتی عضلانی همراه با یک اسکلت بیرونی، ما حرکات اندام تحتانی را شبیهسازی کردیم و سامانه کنترل اسکلت بیرونی را برای دستیابی به الگوهای طبیعی راه رفتن با استفاده از یادگیری تقویتی آموزش دادیم. ما در حال آزمایش این سامانه در شرایط واقعی با اسکلت بیرونی اندام تحتانی خود هستیم. نتایج بهبود پایداری راه رفتن و کاهش خستگی کاربر را نشان میدهد».
این گروه تشخیص داد مدل پیشنهادی آنها یک کنترلکننده قوی و جامع تولید میکند که قادر به مدیریت سطوح مختلف تعاملات انسان و اسکلت بیرونی بدون نیاز به پارامترهای ویژه است. سامانه جدید این پتانسیل را دارد که برای طیف گستردهای از کاربران از جمله افراد دچار آسیب نخاعی، مولتیپل اسکلروزیس، سکته مغزی و سایر بیماریهای عصبی، سودمند باشد. پژوهشگران قصد دارند به آزمایش این سامانه با کاربران ادامه دهند و الگوریتمهای کنترل را برای بهبود عملکرد راه رفتن اصلاح کنند.
دکتر Androwis گفت: «ما در مورد پتانسیل این سامانه جدید برای بهبود کیفیت زندگی افراد مبتلا به اختلالات اندام تحتانی هیجان زده هستیم. ما امیدواریم با فعال کردن الگوهای راه رفتن طبیعیتر و شهودیتر، به کاربران اسکلت بیرونی کمک کنیم تا با راحتی و اطمینان بیشتری حرکت کنند».
>> کنترل دقیق اسکلت های بیرونی عصبی با حسگرهای الماسی
>> برترین اسکلت های بیرونی غیرفعال ناحیه شانه و گردن
منبع: DOI: 10.1186/s12984-023-01147-2
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


