فلج مغزی (CP) یکی از دلایل اصلی ناتوانی کودکان است. اختلالات حرکتی افراد مبتلا به CP به طور قابل توجهی بر سینماتیک راه رفتن تأثیر میگذارد. درمانهای رباتیک به عنوان مداخلهای برای حل این مسئله بسیار محبوب شدهاند. اسکلتهای بیرونی فعال اندام تحتانی (PoLLE) نوعی روش درمانی رباتیک است که فرد را قادر میسازد راه رفتن صحیح روی زمین را بیاموزد. شواهد، اثربخشی اسکلتهای بیرونی در بهبود راه رفتن افراد مبتلا به فلج مغزی با کمترین اثر سوء را اثبات میکند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
فلج مغزی
فلج مغزی (CP) به گروهی از اختلالات عصبی دائمی و غیرپیشرونده اشاره دارد که در رشد مغز جنین یا نوزاد اتفاق میافتد و در درجه اول بر حرکت و وضعیت اثر میگذارد. تخمین زده میشود که ۱۷ میلیون نفر در سراسر جهان مبتلا به فلج مغزی هستند.
سطح فلج مغزی بر اساس سیستم طبقهبندی عملکرد حرکتی درشت (GMFCS) به پنج درجه مختلف طبقهبندی میشود. همه افراد مبتلا به فلج مغزی دارای اختلالات حرکتی هستند، در حالی که فقط برخی ممکن است دارای اختلالات فکری، گفتاری، شنوایی و بینایی و همچنین سایر بیماریهای همزمان مانند صرع باشند. اختلالات حرکتی که اغلب در افراد مبتلا به فلج مغزی دیده میشود شامل ضعف عضلانی، انقباض و خستگی است که همگی میتوانند بر روی الگوی راه رفتن (برای نمونه طول گام یا سرعت راه رفتن) تأثیر بگذارند. بدین ترتیب، مداخلات درمانی اغلب در جهت بهبود اختلالات حرکتی جهت به حداکثر رساندن کارایی و استقلال راه رفتن انجام میشود.
درواقع تمرکز بر بهینهسازی عملکرد و کیفیت زندگی یک فرد است زیرا درمانی برای فلج مغزی وجود ندارد. مداخلات معمول برای رفع اختلالات حرکتی شامل تزریق سم بوتولینوم، جراحی ارتوپدی، آموزش اختصاصی یک مهارت، ارتز، تمرینات قدرتی، کششی، آب درمانی و برنامههای ورزشی در منزل است. همچنین درمان باید شامل درگیری شناختی و تمرین گسترده باشد. ارتباط ذهنی با یادگیری حرکتی یا تعامل شناختی، پتانسیل نوروپلاستیسیتی را افزایش میدهد.
تمرین متعدد یک سبک تمرینی با وقفههای کمتر و کوتاهتر در یک جلسه برای بهینهسازی یادگیری حرکتی بکار میرود. بدلیل تقاضای جسمی که از درمانگران میشود، دستیابی به تمرین متعدد موردنیاز در یک جلسه درمانی دشوار است. درمانهای رباتیک در مدیریت افراد مبتلا به فلج مغزی به عنوان یکی از راههای مقابله با این چالش در نظر گرفته شده است. آموزش راه رفتن با کمک رباتیک به دستگاههایی اشاره دارد که از اسکلتهای بیرونی رباتیک یا صفحههای ویژه پا برای کمک به هدایت حرکات اندام تحتانی استفاده میکنند. آموزش راه رفتن به کمک رباتیک میتواند از نظر شناختی بیمار را بیشتر درگیر کند و نیاز کمتری به نیروی جسمی درمانگران دارد.
مزایای استفاده از اسکلت بیرونی فعال
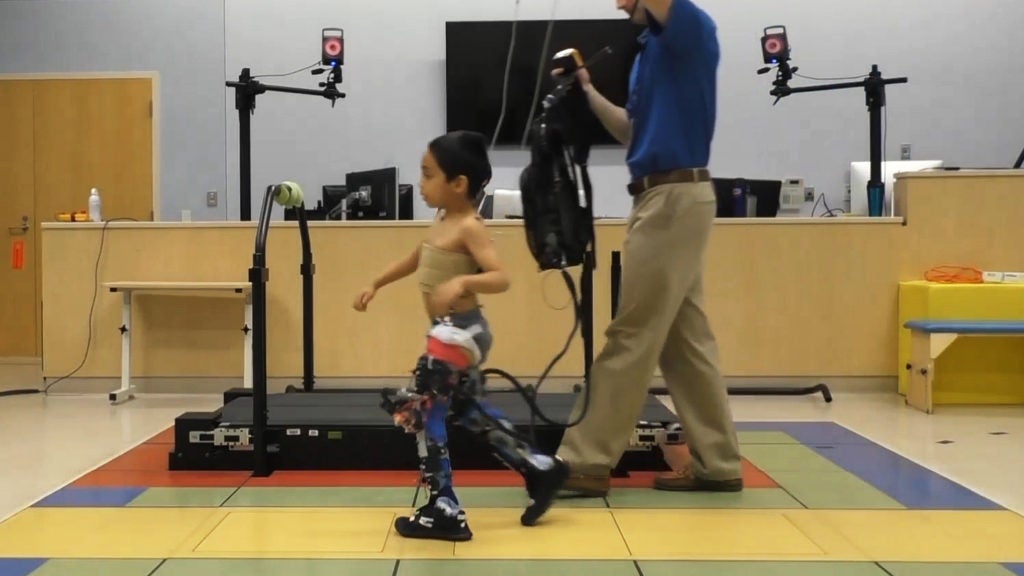
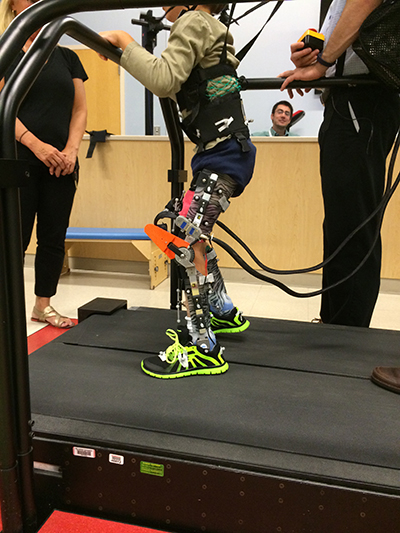
اسکلتهای بیرونی منفعل و فعال اندام تحتانی امکان راه رفتن روی زمین، مستقل از سیستم تردمیل را فراهم میکند. اسکلتهای بیرونی فعال اندام تحتانی (PoLLE) شامل یک ارتز موتوری و فعال است که برای اهداف پزشکی روی اندامهای فلج یا ضعیف قرار میگیرد. در مقابل، اسکلتهای بیرونی منفعل اندام تحتانی به موتور مجهز نیستند و از طریق کاهش نیروی لازم برای ایجاد حرکت در اندام تحتانی کار میکنند. مؤلفه موتوری اسکلت بیرونی افراد را قادر میسازد الگوی راه رفتن طبیعیتری را در مقایسه با الگوی راه رفتن جبرانی و ناکارآمد با اسکلتهای بیرونی منفعل انجام دهند.
نتایج مطالعات و آزمایشها اثبات کرد اسکلتهای بیرونی فعال نقش مثبتی بر پارامترهای گام برداشتن این بیماران دارد. این فناوری موجب بهود سرعت راه رفتن و طول گامهای بیماران شد.
شرکت کنندگان در هنگام راه رفتن با اسکلت بیرونی فعال در مقایسه با راه رفتن روی تردمیل (به تنهایی) انرژی کمتری مصرف میکنند. این ممکن است حاکی از آن باشد که راه رفتن با الگوی عادیتر با افزایش بازده انرژی در این افراد ارتباط دارد. همچنین بهبود کشیدگی زانو در راه رفتن با اسکلتهای بیرونی فعال موجب کاهش انرژی راه رفتن شد زیرا حالت خمیده موجب افزایش مصرف انرژی راه رفتن میشود.
درنهایت راه رفتن میتواند مانع عوارض ثانویه این بیماری شامل انقباضات، وضعیت نادرست ستون فقرات و مفاصل، شکست پوست و کاهش تراکم استخوان شود و گردش خون را بهبود دهد.
بیشتر بخوانیم:
>> راهی برای ارتقای عملکرد و استقلال افراد مبتلا به فلج مغزی
>> تازه ترین فناوری ها برای بهبود زندگی کودکان مبتلا به فلج مغزی
منبع: https://doi.org/10.1371/journal.pone.0252193
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


