گروهی از دانشجویان Caltech در حال توسعه روش جدیدی برای تولید راه رفتن با دستگاههای کمکی رباتیک هستند. هدف آنها تضمین ثبات و دستیابی به حرکت طبیعیتر برای کاربران مختلف است. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
در این روش از ترکیب دینامیک هیبریدی صفر (HZD)، یک چارچوب ریاضی برای ایجاد حرکت پایدار، با یک مدل اسکلتی عضلانی برای کنترل یک وسیلهی کمکی رباتیک برای پیادهروی استفاده شده است.
مدل اسکلتی عضلانی یک ابزار محاسباتی برای اندازهگیری غیرتهاجمی رابطه میان نیروی عضلانی و نیروی تماسی مفصل است. دینامیک هیبریدی صفر در حال حاضر برای ایجاد راه رفتن پایدار برای رباتهای دوپا استفاده میشود و مدل ماهیچهای نشاندهندهی میزان کشش یا انقباض عضله با یک پیکربندی مفصل مشخص است.
کنترل پروتز پا
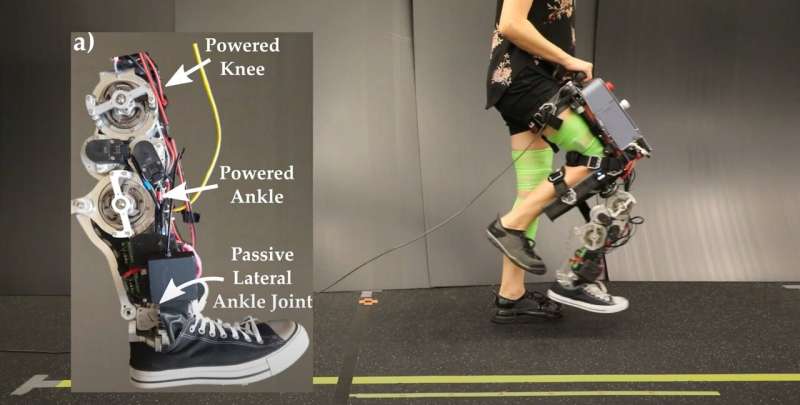
این گروه روش خود را روی یک پای مصنوعی و موتوری نشان داد. موتورها مفاصل را میچرخانند. حرکت موتور با یک الگوریتم ریاضی توسعه یافته توسط پژوهشگران دیکته میشود.
گروه برای ایجاد این الگوریتم ریاضی فعالیت عضلانی فردی که با پروتزی راه میرفت را ثبت کرد. در این حالت حرکت مورد نظر ایجاد شده با HZD به تنهایی تولید میشد. این کار با کمک الکترومیوگرافی (EMG) انجام شد که در آن یک الکترود روی پوست یک عضله خاص قرار میگیرد. سپس این گروه فعالیت EMG فردی که با پروتز راه میرفت را تجزیه و تحلیل کردند. در این حالت حرکات توسط HZD و مدلهای عضلانی ایجاد میشد. مورد دوم بیشتر شبیه شیوه راه رفتن انسان در حالت طبیعی و بدون پروتز بود.
Rachel Gehlhar، دانشجوی فارغالتحصیل رشته مهندسی مکانیک و عمران، میگوید: «الگوی فعالیت ماهیچهای انسان که بدون پروتز راه میرود، چیزی است که ما میخواهیم به آن نزدیک شویم. تعبیه مستقیم مدلهای اسکلتی عضلانی در مسئله بهینهسازی، الگوریتمی که در نهایت راه رفتن را برای پروتز تولید میکند، پایهای برای ایجاد راه رفتنهایی فراهم میکند که طبیعیتر به نظر میرسند».
Maegan Tucker، دانشجوی کارشناسی ارشد مهندسی مکانیک و عمران، میافزاید: «یکی از روشهای کنترل ربات، توصیف حرکات مطلوب برای هر یک از مفاصل است. در این پژوهش ربات مورد نظر یک پروتز پا است. مفاصل زانو و مچ پا در پاسخ به فرمان ارسال شده به موتور، مسیرهای مربوط به خود را دنبال میکنند. دستگاه پروتز ما دو مفصل فعال دارد: زانو و مچ پا. بنابراین حرکات و سرعت مطلوب این مفاصل همان چیزی است که ما کنترل میکنیم».
یک کشف شگفتانگیز این بود که ترکیب HZD و مدلهای ماهیچهای، راه رفتن دلخواه را سریعتر از آنچه انتظار میرفت، ایجاد کرد. مجبور کردن مدل رباتیک به پیروی از الگوهای روابط عضله-تاندون محدودیتهای بیشتری را بوجود میآورد که حل مسئله را دشوارتر میکند. اما با این روش جدید، یک راه رفتن پایدار پس از تکرارهای کمتری ایجاد شد.
Tucker میگوید: «فرض ما این است که این مدل ترکیبی موجب هدایت مسئله به سمت راهکارهایی میشود که به راه رفتن پایدار و طبیعیتر کمک میکند.»
این کار به پر کردن شکاف میان روشهایی که از الگوریتمها برای تولید راه رفتن مورد نظر استفاده میکنند و حوزه بیومکانیک، که معمولاً با هم همپوشانی ندارند، کمک میکند. این روش، ما را یک گام به ترجمه حرکت طبیعی برای یک دستگاههای کمکی رباتیک مانند پروتز نزدیکتر میکند و کاربرده بالقوهای در دستگاههای اسکلت بیرونی برای افراد مبتلا به پاراپلژی دارد.
>> راهی شگفت انگیز برای تسهیل راه رفتن
>> یادگیری ماشین برای کمک به راه رفتن با اسکلت بیرونی
منبع: .caltech.edu
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


