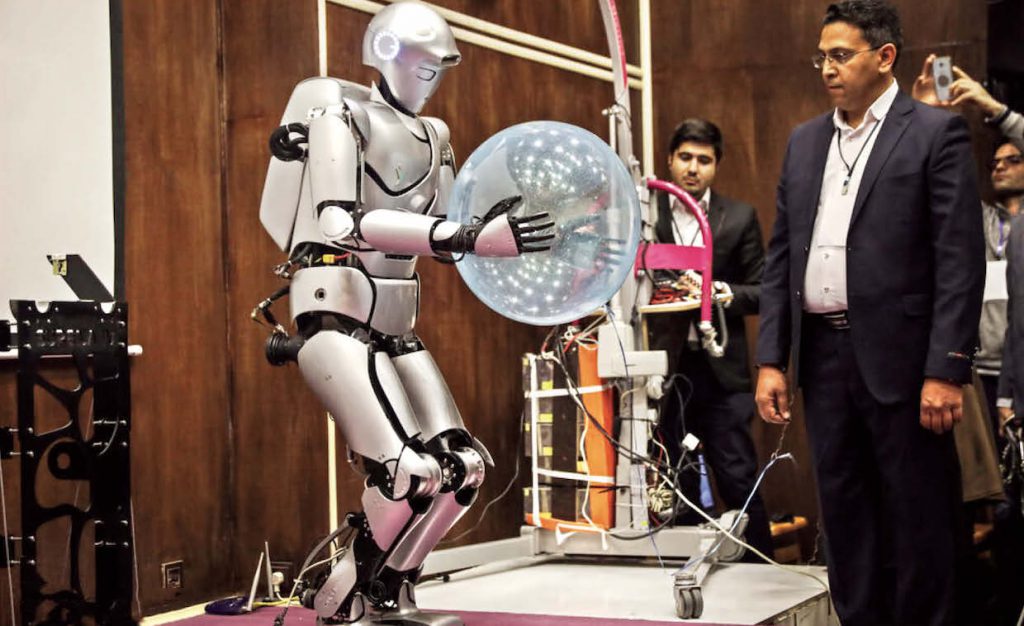
سورنا ۴ یک ربات انساننمای پیشرفته است که توسط پژوهشگران و مهندسان رباتیک دانشگاه تهران ساخته شده است. کمی بیش از یک دهه پیش، محققان دانشگاه تهران یک ربات انساننمای ابتدایی را به نمایش گذاشته بودند. پس از آن دو نسخهی بهبودیافتهی دیگر به نامهای سورنا ۲ و سورنا ۳ رونمایی شد. هماکنون سورنا ۴ با پیشرفت اساسی نسبت به نسخههای پیشین ارائه شده است. ویدیوی منتشر شده از این ربات انساننما، قابلیتهای آن را به خوبی نشان میدهد. ربات همانند یک انسان ایستاده است و یک بطری آب در دست میگیرد و نام خود را بر تخته مینویسد. همچنین در تصویری مشاهده میشود ربات یک عکس سلفی از خود به همراه گروه رباتیک میگیرد. در این مقاله، به قابلیتهای سورنا IV و مقایسه آن با رباتهای انساننمای جهانی میپردازیم. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.

ویژگیهای نسخه جدید سورنا ۴
گروهی با بیش از ۵۰ پژوهشگر در مرکز سیستمها و فناوریهای پیشرفته (CAST) دانشکده مکانیک دانشگاه تهران به سرپرستی دکترعقیل یوسفی کما، استاد مهندسی مکانیک دانشگاه تهران در توسعهی این ربات به مدت ۴ سال همکاری کردهاند.
یکی از مهمترین پیشرفتهای سورنا ۴، بهبود تعامل ربات با محیط است. این نسخه میتواند اشیا را با دقت بیشتری ردیابی کند. سورنا IV به دستهای جدید مجهز شده است. دستهای جدید ربات، چالاکی بیشتری را برای ربات فراهم کردهاند. چنین توسعهای سبب شده است ربات بتواند طیف گستردهای از اشیا از اشیای ظریف تا ابزارهای قدرتی را در دست بگیرد. همچنین وجود حسگرهای نیرو در کف پای ربات، کمک میکند ربات بر سطوح ناهموار گام بردارد. این فرآیند با تنظیم زاویه و محل قرارگیری پاها امکانپذیر میشود. سرعت گام برداشتن ربات ۰٫۷ کیلومتر بر ساعت است. سرعت راه رفتن نسخهی قبلی ۰٫۳ کیلومتر بر ساعت بود.
اگرچه چالاکی و پویایی سورنا ۴ به Atlas، ربات مشهور شرکت بوستون داینامیکس (Boston Dynamics) نمیرسد. با این وجود، این ربات به یک کنترلر حرکتی کامل بدن متکی است که به طور پیوسته وضعیت قرارگیری ربات را تنظیم میکند تا مانع افتادن آن شود. یکی دیگر از پیشرفتهای ربات، کنترلر ربات است. حلقهی کنترلی به دلیل پیادهسازی برد FPGA در فرکانس بالاتر ۲۰۰ هرتز کار میکند. حسگرهای نسخه جدید شامل دوربین سهبعدی، حسگرهای شش محوری نیرو/گشتاور در مچ پا، واحد اندازهگیری لختی (IMU)، سیستم تبدیل متن به گفتار است.
تکامل سورنا
در راستای هماهنگی حسگرها، کنترلرها و محرکها از سیستم عامل ربات (ROS) استفاده شده است. برای شبیه سازی حرکتهای ربات و ارزیابی رفتار آن از جمله راه رفتن به عقب و پهلو و چرخیدن از شبیهساز Gazebo و Choreonoid و Matlab بهره گرفته شده است. ربات سورنا ۴ را در طراحی کلی، با ربات Walker شرکت UBTECH، ربات Asimo شرکت هوندا، Talos ساخت شرکت Pal Robotics، ربات HUBO دانشگاه علم و فناوری پیشرفته کره جنوبی (KAIST) و HRP-2 ساخت موسسه تحقیقاتی AIST ژاپن قابل مقایسه است.
پروفسور یوسفی کما، در راستای شناخته شدن هرچه بیشترسورنا ۴، تلاش میکنند دستاورد خود را در کنفرانسها و نمایشگاههای بینالمللی ارائه کنند. از سوی دیگر، تیم پژوهشی سورنا، مقالات متعددی درزمینهی طراحی ربات انساننما و حرکت بر دو پا منتشر کردهاند. گروه رباتیک سورنا سعی دارند با توسعهی ربات انساننما، در یک چالش بینالمللی شرکت کنند تا کاربردها و کاربران واقعی ربات را بیابند.
همانطور که در ویدیو قابل مشاهده است، در زمان رونمایی سورنا ۴، این ربات با برداشتن یک جعبه، ربات سورنا مینی را نمایش داد. سورنا مینی تنها ۸ درجهِ آزادی داشت و با چرخ حرکت میکرد. سورنا ۲، ۲۲ درجهی آزادی داشت و نخستین نسخهای بود که به جای چرخ بر دو پا گام برمیداشت. سورنا ۳، ۳۱ درجهِ آزادی داشت و میتوانست از پله بالا برود و به توپ ضربه بزند. سرانجام، نسخهی چهارم سورنا ۴۳ درجهی آزادی دارد. یعنی ۱۲ درجهی آزادی بیشتر از نسخهی پیشین که بر بخش دستها اعمال شده است. این ربات انسان نما، دارای قد ۱۷۰ سانتیمتر و ۶۸ کیلوگرم وزن است . بنابراین در مقایسه با نسخه قبلی سبکتر و کوتاهتر شده است. گفتنی است که نسخه سوم ۱٫۹ متر قد و ۹۸ کیلوگرم وزن داشت.
بیشتر بخوانیم:
>>T-HR3 ربات انسان نمای تویوتا
>>کدامیک از ربات های Boston Dynamics برای شما جذاب تر است؟
منبع: spectrum.ieee و interestingengineering
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


