پژوهشگران در دانشگاه MIT موفق به توسعهی سامانهای برای هدایت و هشدار به نابینایان شدند. این سامانه هم میتواند مکمل عصا و هم جایگزین آن باشد. این فناوری پوشیدنی جدید هم وجود موانع و اشیا را هشدار میدهد و هم آنها را از طریق پدهای بریل توصیف میکند. برای آشنایی بیشتر با این سامانه با مجله فناوریهای توانافزا و پوشیدنی همرا باشید.
دانشمندان کامپیوتر دهها سال روی سامانههای هدایت خودکار برای کمک به افراد مبتلا به نقص بینایی کار کردهاند. اما دشوار است که بتوان وسیلهای همچون عصا یافت که به همین اندازه قابل اعتماد و استفاده از آن آسان باشد.
با این حال عصاها نیز دارای چند اشکال میباشند. یکی از آنها این است موانعی که با آنها در تماس هستند گاهی اوقات دیگر افراد هستند. دیگری این است که آنها نمیتوانند نوع خاصی از اشیاء همچون میزها یا صندلی را شناسایی کنند یا تعیین کنند که صندلی قبلاً اشغال شده است یا نه.
پژوهشگران در آزمایشگاه هوش مصنوعی و علوم کامپیوتر در دانشگاه MIT (CSAIL) سامانهای جدید را با استفاده از یک دوربین سه بعدی، یک کمربند با موتورهای ارتعاشی جداگانه قابل توزیع در اطراف آن و یک رابط بریل الکترونیکی قابل تنظیم برای ارائه اطلاعات بیشتر در مورد محیط برای افراد مبتلا به اختلال بینایی ایجاد کردهاند.
این سامانه را میتوان در کنار یا به عنوان یک جایگزین برای عصا استفاده کرد. پژوهشگران در مقالهای که در کنفرانس بینالمللی رباتیک و اتوماسیون ارائه دادند، این سامانه و مجموعهای از مطالعات کاربردی مربوط به نابینایان را معرفی کردند.
Robert Katzschmann، دانشجوی کارشناسی ارشد مهندسی مکانیک در MIT و یکی از نخستین نویسندگان این مقاله میگوید: «ما آزمایشهای متعددی را با کاربران نابینا انجام دادیم. داشتن چیزی که با حسهای دیگرشان تداخل نداشته باشد، مهم بود. بنابراین ما نمیخواستیم هیچ صوتی داشته باشیم، نمیخواستیم چیزی در اطراف سر یا ارتعاشاتی روی گردن داشته باشیم. ما متوجه شدیم که یک منطقه از بدن که دست کم برای سایر حواس اختلالی بوجود نمیآورد، اطراف شکم است».
Katzschmann با توصیه Daniela Rus، Andrew و Erna Viterbi استاد مهندسی برق و علوم کامپیوتر به این گروه پیوست. نخستین نویسنده این مقاله Hsuh-Cheng Wang، هنگام کار روی این مقاله فوق دکترا MIT بود و در حال حاضر استادیار مهندسی برق و کامپیوتر در دانشگاه ملی Chiao Tung در تایوان است. Santani Teng، فوق دکترا در CSAIL است. Brandon Araki، دانشجوی کارشناسی ارشد مهندسی مکانیک و Laura Giarré، استاد مهندسی برق در دانشگاه مودنا و رجیو امیلیا در ایتالیا است.
تجزیه جهان
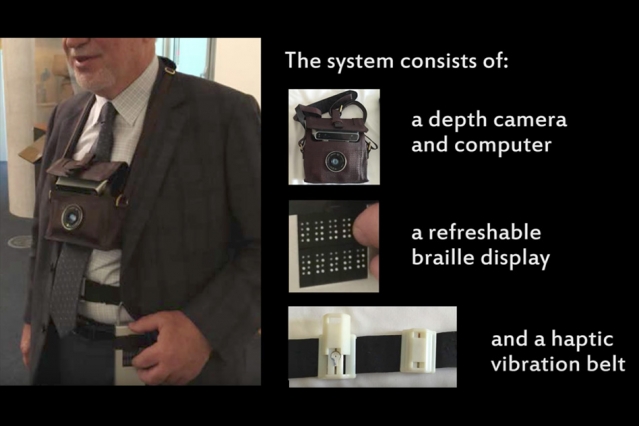
سامانه این پژوهشگران شامل یک دوربین سه بعدی است که در کیسهای در اطراف گردن قرار میگیرد، یک واحد پردازش که الگوریتمهای اختصاصی این گروه را اجرا میکند، کمربندی که دارای پنج موتور ارتعاشی است و یک رابط بریل قابل تنظیم که در پهلوی کاربر پوشیده میشود.
کلید این سامانه یک الگوریتم برای شناسایی سریع سطوح و جهت گیری آنها از دادههای دوربین سه بعدی است. پژوهشگران سه نوع دوربین سه بعدی را آزمایش کردند که از سه روش مختلف برای اندازهگیری عمق بهره میبردند. این الگوریتم براحتی میتواند سطوح و موانع روی سطوح را تشخیص دهد. و اگر فرد در فاصله دو متری از موانع قرار گیرد موتورها شروع به لرزش میکنند.
دادههای لمسی
موتورهای کمربند میتوانند فرکانس، شدت و مدت زمان ارتعاش خود و نیز فاصله زمانی بین آنها را تغییر دهند تا انواع مختلفی از سیگنالهای لمسی را به کاربر ارسال کنند. برای نمونه، افزایش شدت فرکانس نشان میدهد که گیرنده نزدیک به یک مانع در جهت نشان داده شده توسط آن موتور خاص است. هنگامی که سامانه یک صندلی خالی را تشخیص دهد، با دو پالس این موضوع را به کاربر اطلاع میدهد.
رابط کاربری شامل دو ردیف از ۵ پد بریل قابل تنظیم است. نمادهای نمایش داده شده در پدها اشیای محیط کاربر را توصیف میکنند. برای نمونه «t» نشان دهنده میز یا «c» برای صندلی است. موقعیت نماد در ردیفها، نشان دهنده مسیری است که شی آنجا قرار دارد.
در آزمایشها سامانه یافتن صندلی، برخورد فرد با اشیا را برای پیدا کردن صندلی ۸۰ درصد کاهش داد. و سامانه هدایت، برخورد عصا با افرادی که در یک راهرو در حال حرکت هستند را ۸۶ درصد کاهش داد.
در زمینه فناوری نابینایان بیشتر بخوانید:
>>پروژه MATIA برای نابینایان و افراد دارای اختلال حافظه محیط پیرامون را توصیف میکند
>>ساخت گوشی هوشمند با صفحه نمایش بریل برای نابینایان
منبع: robohub
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»