رباتیک کمکی پوشیدنی یک فناوری نوظهور با پتانسیل کمک به انسانهای دچار اختلالات حسی حرکتی برای انجام فعالیتهای روزمره است. این کمک افراد را قادر میسازد تا از نظر فیزیکی و اجتماعی فعال باشند، فعالیتها را به طور مستقل انجام دهند و کیفیت زندگی خود را بازیابی کنند. این نوع از فناوری رباتیک پوشیدنی، که در تماس و تعامل مستقیم با بدن است، نیاز به رعایت انواع الزامات دارد تا سامانه و کمکهای آن را کارآمد، ایمن و قابل استفاده به صورت روزمره برای فرد کند. در ادامه مروری کوتاه داریم بر پیشرفت به دست آمده در سالهای اخیر، چالشها و روندهای فعلی برای طراحی و استقرار رباتیک کمکی پوشیدنی. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
فناوری های سنجش
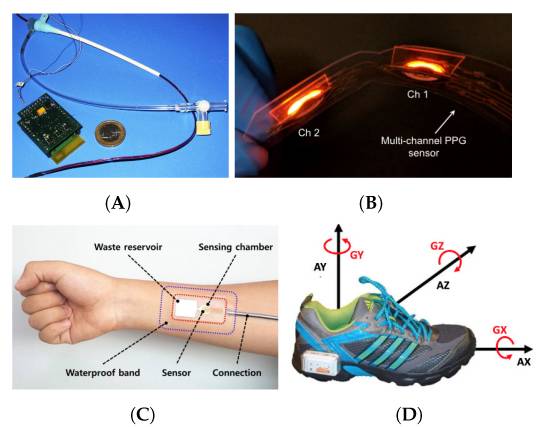
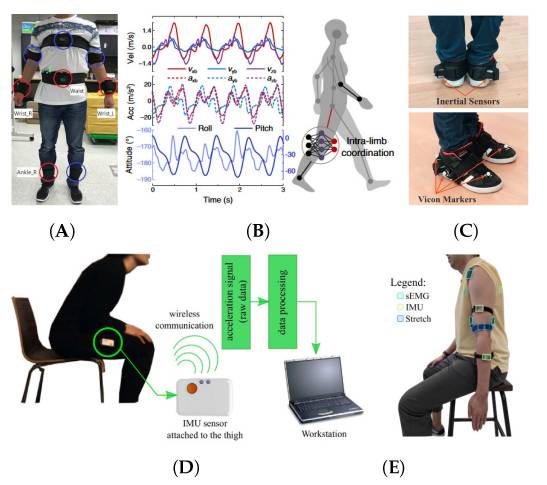
پیشرفت سریع در توسعه لوازم الکترونیکی و مواد انعطافپذیر، توسعه حسگرهای پوشیدنی پیشرفته را برای نظارت بر وضعیت بدن انسان و ربات کمکی امکانپذیر کرده است. برخی از پیشرفتهترین حسگرهای پوشیدنی را میتوان بهعنوان پارچههای الکترونیکی (مانند لباسهای هوشمند) و پچهای الکترونیکی برای نظارت بر جنبههایی همچون موقعیت و جهتگیری اندامهای انسان، حرکت انسان و فعالسازی عضلات، عملکرد قلب، فعالیت مغز، آپنه خواب و بیماری پارکینسون به کار برد.
بسیاری از حسگرها در افراد برای نظارت بکار میرود، مانند فعالیتهای ورزشی یا برای آزمایشهای بالینی و تشخیص بیماری استفاده میشوند. این حسگرهای پوشیدنی همچنین در دستگاههایی مانند ارتزهای رباتیک، اسکلتهای بیرونی و دستکشهای پوشیدنی نرم برای کمک به توانبخشی انسان و انجام فعالیتهای روزمره استفاده شدهاند. یکی دیگر از جنبههای جالب پوشیدنیها این است که بسیاری از این دستگاهها میتوانند توسط مراقبین برای نظارت بر بیماران و شناسایی و مدیریت درمانها در خانه استفاده شوند که تأثیر مستقیمی بر کیفیت زندگی و بر بخش مراقبت دارند. فناوریهای ارتباطی بیسیم، الکترونیک کمتوان، مواد نرم و اینترنت اشیا تا حد بسیاری به حسگرهای پوشیدنی کمک کردهاند تا کوچکتر، سبکتر و کمتر دست و پا گیر شوند. همچنین به ساخت دادههای قابل دسترسی از راه دور برای نظارت، پردازش و کنترل آنلاین کمک کردهاند.
چالش های فعلی در ربات های کمکی پوشیدنی
رباتیک های کمکی پوشیدنی هنوز با چالش های مختلفی روبرو هستند تا اطمینان حاصل شود که این سامانهها در محیطهای واقعی قابل اعتماد و کاربردی هستند و با نیازهای کاربر مطابقت دارند. این چالشها که شامل سازگاری دستگاه، خارج شدن از آزمایشگاه و ورود به دنیای واقعی، فناوری سنجش و مقبولیت نزد کاربر است، در این بخش مورد بحث قرار میگیرند.
۱- سازگاری دستگاه با کاربر (رباتیک شخصی)
نیاز به دستگاههای کمکی شخصیسازی شده و سازگار به طور گستردهای شناخته شده است. سازگاری به چگونگی تطبیق دستگاهها با تغییرات در محیط عملیاتی خود اشاره دارد، چنین تغییراتی ممکن است شامل عادات کاربر، موقعیتها، ترجیحات فردی و تغییرات بیرونی باشد. در عمل، انطباق به معنای تغییر روش ربات کمکی برای پاسخگویی به دستورات ویژه کاربر، تشخیص قصد کاربر، واکنش به تغییرات بیرونی مانند بیثباتی حسگر، یا اصلاح روش مداخله است. این تغییرات را میتوان به دو دسته کلی تقسیم کرد: کاربر محور و بیرونی. سازگاری اغلب به عنوان یک مشکل یادگیری ماشین در نظر گرفته میشود. پژوهشهای مختلف روشهایی را برای پرداختن به سازگاری سامانههای کمکی پیشنهاد کردهاند، با این حال، اطمینان از کمک ایمن، قابل اعتماد و کارآمد و قابل قبول بودن دستگاه، یک چالش باقی مانده است.
۲- خروج از آزمایشگاه و ورود به دنیای واقعی
رباتهای کمکی پوشیدنی معمولاً در آزمایشگاهها در شرایط کنترلشده و محیط ساختاریافته طراحی و آزمایش میشوند. فرآیندهای آزمایشی از دستور العملهایی پیروی میکنند که تنها برای آزمایشگاه طراحی شدهاند، جایی که کاربر اقدامات از پیش تعریفشده، تنظیمات کنترلشده و همانطور که پژوهشگر نشان داده را انجام میدهد. برای نمونه، راه رفتن در امتداد مسیر معینی متشکل از سطوح مسطح، پلهها و رمپها، گرفتن اشیاء و حرکت آنها از نقطهای به نقطه دیگر. در محیطهای آزمایشگاهی، این آزمایشها شامل استفاده از تردمیلهایی با سرعت و شیب کنترلشده و اشیایی است که بهطور ویژه طراحی شدهاند.
این رویکرد امکان تجزیه و تحلیل سیستماتیک دادهها، نظارت و کنترل دستگاه کمکی را حین پاسخگویی به حرکات مختلف کاربر فراهم میکند. با این حال، این فرآیند هنوز موقعیتهایی را که یک فرد میتواند در محیطهای بیرونی تجربه کند، مانند راه رفتن در زمینها و شرایط محیطی مختلف، تغییر سرعت راه رفتن، گرفتن و دست زدن به اشیای واقعی برای استفاده روزمره، منعکس نمیکند.
این تفاوت در تنظیمات بر عملکرد ربات برای سنجش، تصمیمگیری و کنترل کمکهای مورد نیاز کاربر تأثیر میگذارد. ترجمه رباتهای کمکی از آزمایشگاه به محیطهای واقعی موضوع مهمی است که برای داشتن رباتهایی که میتوانند مورد پذیرش و استفاده روزانه افراد قرار گیرند، باید به آن پرداخته شود. روشهای محاسباتی نیز معمولاً با فرض در دسترس بودن دادههای تمیز و دقیق از حسگرهای پوشیدنی و سامانه رباتیک طراحی و آموزش داده میشوند. این فرض در شبیهسازی و محیطهای آزمایشگاهی به خوبی کنترل شده بسیار خوب عمل میکند، با این حال، عملکرد آنها هنگام آزمایش در محیطهای واقعی به شدت تحتتأثیر قرار میگیرد.
افزون بر این، تغییر غیرمنتظره، متفاوت و مداوم موقعیتهای روزمرهی تجربه شده توسط شخص، بدون شک دادههای پیچیده و بدون برچسب ایجاد میکند که عملکرد رباتهای کمکی را کاهش میدهد و ایمنی کاربر را به خطر میاندازد. بنابراین، داشتن سامانههایی با روشهایی که قادر به یادگیری مداوم و دقیق از وضعیت بدن انسان، ربات و محیط برای سازگاری با شرایط روزمره و غیرمنتظره باشند، مهم است.
۳- فناوری سنجش پوشیدنی
اگرچه فناوری حسگر به سرعت پیشرفت کرده است و امکان نظارت چندوجهی را در دستگاههای کمکی پوشیدنی فراهم میکند، عناصری مانند وزن کم، مصرف کم انرژی، طول عمر باتری و کالیبراسیون وجود دارند که همچنان یک چالش هستند. داشتن دستگاههای حسگر با مصرف کم انرژی میتواند زمان نظارت بین شارژ را افزایش دهد، با کاهش وزن نیاز به ذخیره انرژی کمتر میشود، اما همچنین میتواند فرصتهایی را برای بهرهبرداری از فناوریهای نوظهور مانند برداشت انرژی به طور مستقیم از کاربر و ربات پوشیدنی باز کند.
طول عمر باتری، وزن و نگهداری از عناصر اصلی هستند که باید در فرآیند طراحی حسگر مورد توجه قرار گیرند. این جنبهها به رباتهای کمکی اجازه میدهد تا برای مدت طولانیتری بدون شارژ مجدد باتری و همچنین بدون نیاز به کالیبره کردن حسگرها یا تعویض آنها استفاده شوند. در حال حاضر، عناصر بسیاری وجود دارند که به طور مستقیم به مواد و فناوریهای جدید مرتبط نیستند. برخی از این موارد عبارتند از ماژولهای ارتباطی (مانند WiFi، بلوتوث)، یکپارچگی و حفاظت دادهها، مشکلات در مکانیابی دقیق با استفاده از برای نمونه GPS و تلفنهای همراه و طراحی رابطهای مناسب برای امکان استخراج اطلاعات از کاربرانی که ممکن است دچار معلولیت باشند یا قادر به تعامل با سامانههای دیجیتال نیستند.
این چالشهای فنی باید برای طراحی فناوری سنجش پوشیدنی مورد توجه قرار گیرد. با این حال، فقدان آزمایش قوی، سیستماتیک و بر روی تعداد بسیاری از بیماران با نیازهای مختلف برای نظارت و کمک وجود دارد که نشان دهندهی یک چالش برای استفاده از حسگرهای پوشیدنی در طیف گستردهای از سامانههای نظارتی و کمکی است. این فرآیند معمولاً به دلیل زمان و هزینهی جذب بیماران، آمادهسازی و اجرای آزمایشها، محدود یا حتی نادیده گرفته میشود و در نتیجه، طراحی حسگرهای پوشیدنی را تنها به محیطهای آکادمیک و کاملاً کنترل شده محدود میکند. پس توسعه حسگرهای پوشیدنی که از نظر بالینی قابل دوام هستند و برای اجرا در شرایط واقعی بیماران اثبات شده هستند و همچنین قوی، قابل اعتماد و راحت هستند، ضروری است.
۴- مقبولیت نزد کاربر
حتی با وجود پیشرفتهای بسیار در فناوری کمکی، رها کردن دستگاه یکی از چالشهای اصلی باقی مانده است. پروتزهای اندام فوقانی را میتوان نمونهای در نظر گرفت که تا ۷۵ درصد از کاربران پروتز خود را رها میکنند، آنها این دستگاهها را ناراحت کننده و با عملکرد ناکافی میدانند. مطالعات روندهای مشابهی را در میان فناوریهای کمکی مختلف نشان میدهد، که در آن دلایل رها کردن دستگاه بین کاربران متفاوت است، اما بر عدم تطابق بین انتظارات و واقعیت تأکید دارند. این مسائل، پژوهشگران را برانگیخته است تا به سمت یک فرآیند طراحی با تأکید بیشتر بر علایق کاربر حرکت کنند.
همکاری مشترک یک چارچوب طراحی است که اخیراً مورد توجه قرار گرفته است. این مشارکت، ذینفعان مختلف را مطمئن میکند که عدم تطابق بین نیازهای کاربر و ویژگیهای محصول توسعه یافته را به حداقل و تأثیر را به حداکثر برساند. ذینفعان شامل کاربران، متخصصان مراقبتهای بهداشتی و همچنین نمایندگان صنعتی و سیاستگذاران هستند. هر یک از ذینفعان دیدگاه خاصی را ارائه میدهند. کاربران در قلب فرآیند قرار دارند و طراحان را قادر میسازند تا از تجربه زندگی کاربران بیاموزند. متخصصان مراقبتهای بهداشتی چشمانداز جامعتری از نگرانیها و مسائل رایج پیش آمده ارائه میدهند. مشارکت آنها به ویژه مهم است زیرا متخصصان کاربران را در طول فرآیند تصمیمگیری در مورد انتخاب فناوری کمکی راهنمایی و پشتیبانی میکنند. سرمایهگذاران و سیاستگذاران کلیدی هستند تا اطمینان حاصل کنند ترجمه پژوهشگران به آنچه که به عنوان “دره مرگ” توصیف شده است ختم نمیشود که شکافی بین فناوریهای موجود و محصولات تجاری ایجاد میکند.
کاهش وزن ربات کمکی پوشیدنی یکی دیگر از جنبههای چالش برانگیز برای راحت و قابل قبول کردن سامانه برای کاربر است. وزن و قابلیت حمل تحت تأثیر منبع تغذیه سنگین قرار میگیرد، که برای ایجاد استقلال طولانیتر و همچنین مطابقت با الزامات نیروهای کمکی وابسته به فعالیت، مانند راه رفتن، دویدن، تغییر حالت از نشستن به ایستادن مورد نیاز است. با توسعه سامانههای محرک ساده و کارآمد، که استفاده از منابع تغذیه کوچک را امکانپذیر میسازد، منبع تغذیه همچنان یک چالش در رباتیک پوشیدنی برای کمک به فعالیتهای روزمره است.
سایر جنبههای مهمی که برای مقبولیت دستگاه باید در نظر گرفته شود، درک کاربر در مورد خطر استفاده از هوش مصنوعی و اینترنت اشیا برای جمعآوری و اشتراک گذاری دادهها و کنترل سامانه است. این جنبهها کاربر را از نگرانیهای اخلاقی، حفظ حریم خصوصی و ایمنی آگاه میسازد، که در میان جوانان رایجتر است – کاربران آینده دستگاههای کمکی که در حال حاضر در حال توسعه هستند. این نگرانی ها باید در طول فرآیند طراحی رباتهای کمکی در نظر گرفته شود تا اطمینان حاصل شود که افراد قادر به اعتماد و استفاده از دستگاهها هستند. همچنین، پژوهشگران باید با چارچوبهایی مانند مدل پذیرش فناوری (TAM) آشنا باشند تا اطمینان حاصل کنند فاکتورهای پذیرش مربوطه در ربات گنجانده شده است و خطرات ایمنی و حریم خصوصی ناشی از هوش مصنوعی و اینترنت اشیا را به حداقل میرساند.
>> رباتیک کمکی پوشیدنی: چالش های فعلی و مسیرهای آینده (بخش نخست)
>> رباتیک کمکی پوشیدنی: چالش های فعلی و مسیرهای آینده (بخش سوم)
منبع: doi: ۱۰٫۳۳۹۰/s21206751
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


