در مصاحبه با یونگ پارک (Yong-Lae Park)، دانشیار گروه مهندسی مکانیک و هوافضای دانشگاه ملی سئول، او دربارهی ساخت و طراحی میکرورباتها و رباتهای نرم الهام گرفته از سامانههای زیستی با کاربرد پزشکی صحبت میکند. هدف پژوهش یونگ پارک، تحلیل چگونگی طراحی و پویایی سامانههای زیستی و به کارگیری آنها در سامانههای رباتیک و مکاترونیک است. برخی از پژوهشهای یونگ شامل حسگرهای پوستی هوشمند، محرکهای عضلانی نرم و اسکلتهای بیرونی با هدف توانبخشی بیماران است. در این مقاله، با آیندهی رباتهای نرم آشنا میشویم. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
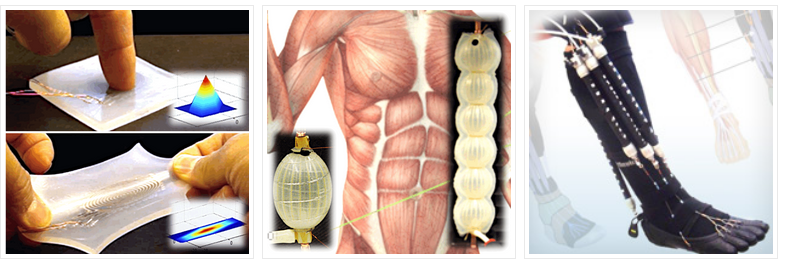
زمینهی پژوهشی یونگ پارک، رباتهای نرم است. ربات نرم را میتوان رباتی تعریف کرد که از مواد و ساختار نرم ساخته میشود. با ورود رباتها به دنیای انسانها، انتظار میرود که رباتها ایمن و انعطافپذیر و به طور کلی سازگار با انسان باشند. موضوع رباتهای نرم در حال گسترش است. امروزه افراد بسیاری به عنوان پژوهشگر رباتهای نرم در حال فعالیت هستند. یونگ پارک در آزمایشگاه رباتهای نرم، به ساخت حسگرها و محرکهای نرم میپردازد. او مدارهای الکترونیکی را بر لاستیک سیلیکون تعبیه میکند. لاستیک سیلیکون نوعی پلیمر انعطافپذیر است. با کمک حسگرهای تعبیه شده بر لاستیک سیلیکون میتوان اطلاعات مفیدی از محیط شامل شناسایی حرکت بدن دریافت کرد. همچنین محرکهای عضلانی نرم نیز مانند ماهیچههای نرم انسان طراحی میشوند. مجموعهای از حسگرها و محرکهای نرم، یک ربات نرم را تشکیل میدهند.
ربات نرم میتواند مستقل باشد و یا در تعامل با بدن انسان به عنوان اسکلت پوشیدنی طراحی شود. ربات نرم به عنوان اسکلت بیرونی میتواند به حرکت بدن و توانبخشی کمک کند. با وجود بخشهای نرم ربات، حتی ضربهی ربات به انسان باعث آسیب نخواهد شد. از سوی دیگر، از نظر روانشناسی تعامل انسان با رباتهای نرم نسبت به رباتهای سخت آسانتر صورت میگیرد.
یونگ پارک توضیح میدهد هنوز دقت حسگرهای نرم کمتر از حسگرهای رایج سخت است. رفتار حسگرهای رایج با ساختار سخت قابل پیشبینی است. در آینده تلاش خواهد شد دقت حسگرهای نرم افزایش یابد. از سوی دیگر مهندسان مواد تلاش میکنند رفتار مکانیکی پلیمرها را بهبود دهند. توسعهی رباتهای نرم توسط گروهی از پژوهشگران در شاخههای متنوع مهندسی الکترونیک، مهندسی مواد و حتی مهندسی رایانه انجام میشود.
نخستین کاربرد رباتهای نرم را میتوان در موضوع تشخیص حرکت مشاهده کرد. هماکنون، آشکارسازهای حرکت نوعی حسگر نوری هستند که با تغییر نور در محیط حرکت را تشخیص میدهند. از حسگرهای نوری میتوان در فضاهای بسته استفاده کرد زیرا به چندین دوربین برای آشکارسازی حرکت نیاز است. برای تشخیص حرکت بدن در فضاهای بیرونی و بزرگتربا کاربرد ورزشی یا پزشکی، حسگرهای نرم قابل استفاده هستند. نظارت بر حرکت اندامهای بدن به متخصصان کمک میکند که روند حرکت بدن را بررسی کنند. حتی با استفاده از محرکهای نرم در رباتهای نرم میتوان به تصحیح حرکت کاربر پرداخت.
یکی دیگر از کاربردهای رباتهای نرم، تشخیص بیماری یا رساندن دارو درون بدن انسان است. با پیشرفت رباتهای نرم، افزون بر کاربردهای صنعتی رباتهای سخت ما به نسل جدیدی از رباتها روبرو خواهیم شد که در زندگی روزمره و در تعامل با انسان بهتر عمل میکنند.
در همین زمینه بخوانیم:
>>این دستکش رباتیک میتواند عملکرد دست بیماران آسیب نخاعی را بازگرداند
>>ساخت رباتهای نرم شبیه عضلات انسان
>>رباتیک الهامگرفته از طبیعت
منبع: robohub
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


