طراحی هوشمند یک شیر اطمینان به رباتها اجازه میدهد بدون دخالت رایانه به محرکهای محیطی پاسخگو باشند. شیر اطمینان در واقع یک خروجی برای کنترل فشار در سیستم است. این شیر با اطمینان از اینکه فشار سیستم بیش از یک مقدار بیشینه نخواهد شد، عملکرد بهینه سیستم را تضمین میکند. پژوهشگران AMOLF در مقالهای در مجله Matter از این طراحی خود سخن گفتهاند. این طرح به رباتها حرکاتی طبیعیتر میبخشد. همچنین بازخورد لمسی را به آنچه در یک سامانه زیستی هست نزدیکتر میکند. چنین طرحی برای کاوش مناطق ناشناخته با سطوح سخت، یا کاربردهای پزشکی رباتهای نرم مفید است. در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به مرور طرح این ربات میپردازیم.
ربات بدون پردازنده و مدارهای الکترونیکی
تصویری که بسیاری کاربران از رباتها در ذهن دارند یک ماشین سخت است. وسیلهای که با یک پردازنده و با محاسبه هر گام به حرکت در میآید. اما حرکت نرم و خرامان موجودات زنده به علت هوشی است که در قسمتهای مختلف بدن آنان طعبیه شده است. این ایده برای رباتهایی که به وفور با مردم در تماسند، مانند رباتهای کلینیکی، بسیار مفید است. پژوهشگران این شاخه از رباتیک نرم معمولا رباتهای خود را با مواد منعطف و حساس به تغییرات محیط میسازند. به این شکل ربات نیازی به هدایت خارجی رایانه ندارد.
Bas Cvervelde، سرپرست Soft Robotic Matter Group در AMOLF است. وی یکی از اهداف گروه خود را ساخت رباتهایی بدون سامانه هدایت رایانه دانست. رباتهایی که در پاسخ به محرک محیطی کنشی در بدنه خود تجربه میکنند. سپس به واسطه این کنش یک واکنش به محرک نشان داده میشود. گروه Overveld با چاپ مقاله خود از طراحی چنین رباتی خبره داده است. ربات نرم آنان با فشار هوا و بدون مدار الکترونیکی کار میکند. این ربات میتواند راه برود، و آهنگ حرکت را با پاسخ به محرک محیطی تغییر دهد. همه این کارها به لطف طراحی هوشمندانه یک شیر اطمینان میسر شده است.
ایده در بطری سس قرمز در یک ربات نرم
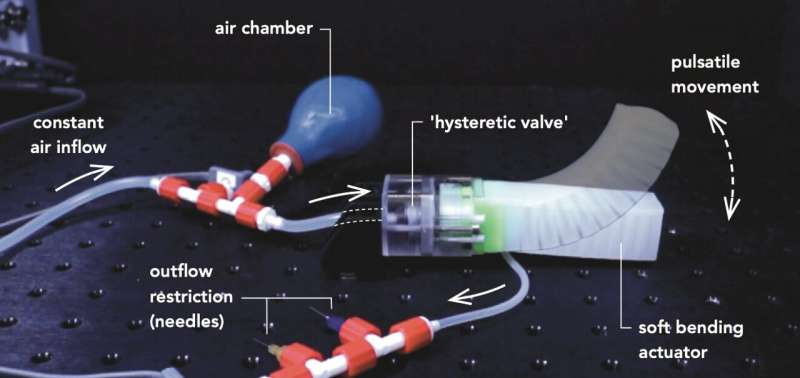
پژوهشگران این طرح از شیری که طراحی کردهاند با عنوان «شیر هیستریتیک» نام میبرند. از نظر یک بیننده این شیر شبیه دهنه یک بطری سس قرمز است. دهنه بطری سس برای این هست که کاربر میزان سس مورد نیاز خود را به راحتی خارج کند و سس درز نکند. اما اگر شیشه سس را برعکس کنید و فشار دهید، سس به همه جا میپاشد. این اتفاق به علت مسدود شدن و باز شدن متناوب دریچه سس است. دریهای جدیدتر طوری طراحی میشوند که تا حد ممکن سس کمتری به اطراف بپاشد. اما گروه Overveld تصمیم گرفتند که این رفتار نوخوشایند را بیشتر بشناسند تا شاید به واسطه آن راحی برای حرکت دادن رباتها بیابند.
مدل سازی رایانه ای ربات نرم بدون پردازنده
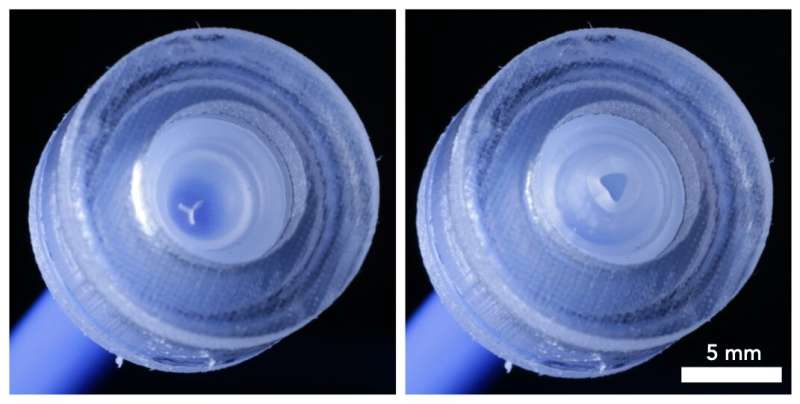
پژوهشگران با یک مدل رایانهای کار خود را آغاز کردند. آنان ویژگیهایی مانند سختی ضربات شیر هنگام باز و بسته شدن را نگاه کردند. سپس شیر را با استفاده از قالبی پلاستیکی سیلیکونی ساختند. قالبی که با چاپ سه بعدی دقیق ساخته بودند. سپس به کمک لیزر شیارهایی در این شیر درست کردند. نتیجه شیری اطمینان بود که در حالت عادی بسته است و هر گاه فشار از حد آستانه بالاتر رود، به طور ناگهانی باز میشود. شیر اطمینان با کم شدن قابل ملاحظه فشار بسته میشود. اگر این شیر اطمینان را به یک پمپ و منبع وصل کنید، شاهد باز و بسته شدن شیر به شکل متناوب، و تغییر متناوب فشار خواهید بود. به عبارتی یک سامانه خواهید داشته که به صورت متناوب عضلات رباتیک را منقبض و منبسط میکند.
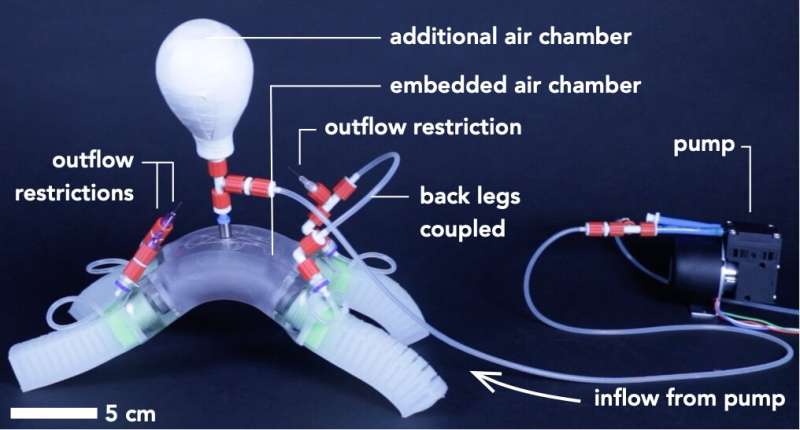
این شیر به نظر کارکرد سادهای دارد. اما در اصل قدرت این شیر در نگاه اول مشخص نیست. Luuk van Laake دانشجوی دکتری AMOLF بیان کرد که «با ساختن مدل رایانهای از دو شیر با این ویژگیها که به منبع یکسانی متصل هستند، شاهد باز و بسته شدن متناوب این دو شیر با دقت بالا بودیم. چیزی که اصلا انتظار آن را نداشتیم. اما در عمل هم این شیر به همین شکل کار کرد.» بر اساس همین کارکرد و با استفاده از شیر جدید، گروه یک ربات چهارپا طراحی کردند که بدون دریافت دستورات از منبع خارجی، به صورتی طبیعی، راه میرفت. آنان همچنین یک دست رباتیک نرم با پنج انگشت تاشو ساختند. این پنج انگشت به صورت متناوب خم و راست میشوند.

پاسخ عضلات مصنوعی ربات به محرک های محیطی
رویایی غایی طراحان رباتهای نرم، رباتی است که نه تنها حرکت میکند بلکه قادر است به محرکهای محیطی پاسخی مناسب بدهد. به گفته Laake: «در نهایت خواستار رباتی هستید که فقط در واکنش به تغییرات فشار عضلات و مفاصل، هرگاه با مانعی برخورد کرد راه رفتنش تغییر کند.»
واکنش این ربات در آزمایشگاه به محرکهای محیطی خوب بوده است. وقتی پژوهشگران یکی از لولههای منعطف را مختصرا با فشار دست له کردند، فشار داخل بدنه ربات عوض شد و ربات راه رفتن خود را تغییر داد. پس این ربات نرم بدون نیاز به پردازشگر هدایت کننده به خوبی به محرک پاسخ داد.
بازده ربات نرم
هنوز برای ساختن یک ربات نرم که در منزل به شما خدمت کند راه زیادی در پیش است. اما پژوهشگران در مورد آینده رباتهای نرم خوشبین هستند. به گفته Overveld این ربات نرم میتواند با اجزای ساده رفتار پیچیده تولید کند. و نیازی هم به مدارهای الکتریکی ندارد.
به گفته Laake یک ربات نرم که به علت انقباضات طبیعی حرکت میکند، با ذخیره قدرت پردازنده در مصرف انرژی هم بهینهتر خواهد بود. در موجودات زنده حرکت بدن و اعضا به علت شکل بدن و مکانیک عضلات هم هست. در عوض مغز وظیفه هماهنگ کردن حرکات را به عهده دارد. به عنوان مثال قلب ما به طور خودکار فشار دهلیزهای چپ و راست را متعادل میکند. این انرژی الاستیک درتاندونها ذخیره میشود. بنابراین هنوز حرکات بسیاری است که در این حوزه باید بررسی شود.
منسوجات هوشمند حرکات کاربرانشان را تشخیص میدهند
دستگاهی پوشیدنی برای کمک به افراد مبتلا به بیماری ژنتیکی PIEZO2-LOF
منبع: techxplore «استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


