Ben Vagle که تنها ۱۷ سال سن دارد به کمک گروهی از دوستان خود توانست روش جدیدی برای گام برداشتن رباتها توسعه دهد. این روش جدید که از یورتمه رفتن اسب الهام گرفته است موجب میشود ربات روی زمینهای ناهموار به راحتی راه برود. برای آشنایی بیشتر با این ربات و روش گام برداشتن آن با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
Ben Vagle یکی از اعضای گروهی است که در حال توسعه یک روش جدید برای راه رفتن رباتها هستند. این روش جدید از یورتمه رفتن اسب الهام گرفته است. Ben و دوستانش در گاراژ خانه خود این ربات را توسعه دادند.
درست شبیه جهش کردن که خسته کنندهتر از راه رفتن ساده است، رباتها در عبور از موانع و جاهای پر از دست انداز نیاز به انرژی بیشتری برای راه رفتن دارند. این ممکن است در مقیاسهای کوچک یک مشکل نباشد، اما همانطور که وزن یک ربات افزایش مییابد به حرکتی نرمتر و هموارتر نیز نیاز خواهد داشت. نسخه اول ربات TrotBot تا حدودی از دست اندازها و موانع عبور میکند، اما همانطور که میتوانید در ویدیوی زیر ببینید، وزن TrotBot در مقیاس LEGO به اندازه کافی کم است که بتواند به خوبی راه برود:
با این حال زمانی که EV3 (نسل سوم ابزار رباتیک، Lego Mindstorms EV3) نسبتاً سنگین LEGO به TrotBot افزوده شد، آن به خوبی عمل نمیکرد. برای کاهش انرژی مورد نیاز، TrotBot باید نرمتر راه میرفت. برای رسیدن به این هدف پاهای فعال که تقلیدی از حرکت پاهای یک اسب حین یورتمه رفتن است، به ربات افزوده شد.
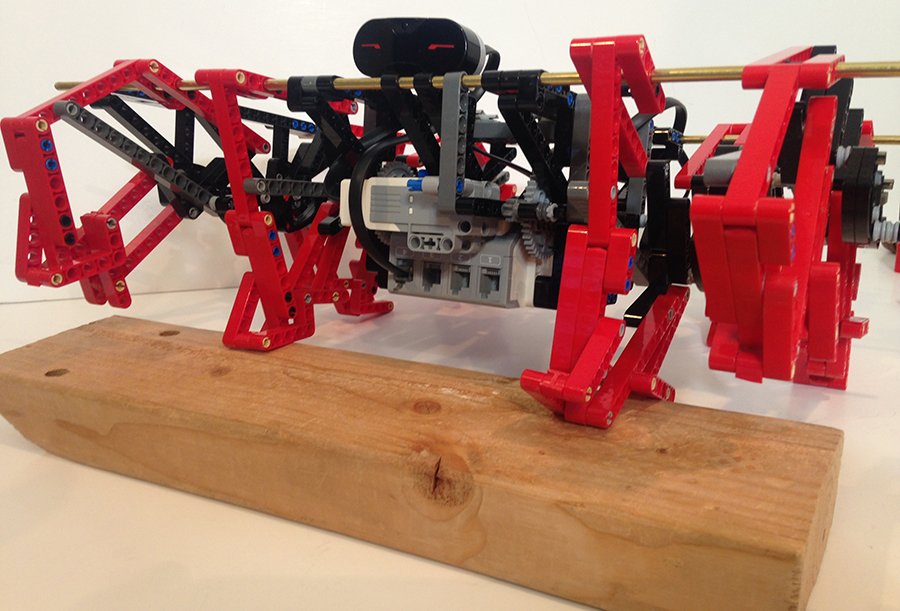
ربات TrotBot و پاهایش
هدف این گروه از ساخت ربات TrotBot، ایجاد یک روش جدید راه رفتن است تا ربات بتواند روی زمین ناهموار و مناطقی که برای وسایل نقلیه چرخ دار غیر قابل دسترس است، گام بردارد. آنها در ابتدا نمونه اولیه TrotBot را در LEGO با ۸ پا طراحی کردند. آن به اندازه کافی خوب بود و گروه تا حدودی ساده لوحانه فکر کرد که حتی این ربات میتواند در اندازه یک ون کوچک نیز تنها با ۸ پا گام بردارد. اما آنها متوجه شدند همانطور که ربات بزرگتر میشود باید همیشه دست کم یک پا در هر گوشه در تماس با زمین باشد. همچون چهار چرخ یک خودرو که همیشه در تماس با زمین است. در این ویدیو میتوانید شبیهسازی یک نسخه ۱۲ پایی از TrotBot را ببینید که بسیار شبیه Strandbeest معروف Theo Jansen است:
برای تبدیل ربات TrotBot به یک نسخه ۱۲ پایی قسمتهای جدید بسیاری لازم بود و آنها نمیخواستند از ابتدا آغاز کنند. بنابراین ایدهای برای پاهای فعال یافتند که TrotBot بتواند با ۸ پا به نرمی گام بردارد.
با الهام از راه رفتن چهار نعل اسب و اینکه چگونه پاهای عقب اسب روی زمین قرار میگیرد، آنها قسمتهایی را به ربات افزودند. نتیجه، اتصالات اضافی است که آن را پاشنه TrotBot نامیدند. این پاشنهها تماس با زمین را حدود ۱۰ درصد افزایش داد. این افزایش تماس با زمین موجب شد سرخوردن پاها کاهش و ارتفاع گامهای پاهای عقب TrotBot نیز افزایش یابد. در ویدیوی زیر یک مقایسه بین پاشنه TrotBot و یورتمه رفتن اسب را میتوانید مشاهده کنید:
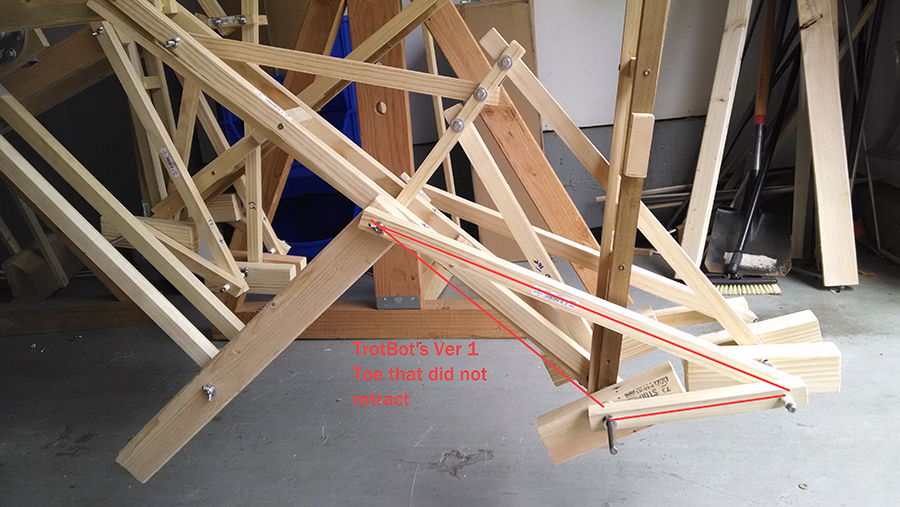
سپس آنها افزودن برخی از انواع انگشتان را بررسی کردند تا هنگام بلند کردن پا به زمین فشار آورد، همچون عملکرد انگشتان پای انسان هنگام گام برداشتن. یک نوع از این انگشتان روی TrotBot نصب شد اما ربات نمیتوانست به نرمی حرکت کند و از آنجایی که آنها با یک زاویه ثابت به پاها متصل شدند به خوبی از روی موانع عبور نمیکردند. گاهی نیز به هنگام عبور از موانع اتصالات قفل شده و چرخ دندهها به سختی کار میکردند. به عبارت دیگر، این انگشتان هدف اصلی که ایجاد مکانیسمی است که بتواند روی زمینهای ناهموار حرکت کند را به خطر میانداخت. در اینجا یک تصویر از انگشتان را میبینید:
آنها دوباره به یورتمه رفتن اسب نگاه کردند. سپس آزمایش اتصالاتی که به تقلید از حرکت سم اسب و ضربه زدن آنها به زمین بود را آغاز کردند. در نهایت چند گزینه که این عمل را تقلید میکرد، یافتند. سپس گام برداشتن را با افزایش تماس ۱۰ درصدی TrotBot با زمین هموار کردند. یکی از این گزینهها به نسخه دوم ربات TrotBot افزوده شد و با اینکه انگشتان ابعاد دقیقی ندارند هنوز هم راه رفتن TrotBot به طور قابل توجهی هموار است:
بیشتر بخوانید:
>>ساخت رباتهای سریع و چابک با الهام از طبیعت
منبع: robohub
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


