در ۲۵ سال آینده میلیونها انسان در شهرها زندگی خواهند کرد و قیمت زمینها به حدی میرسد که مجبوریم روی استفاده بهینه از فضای ساختمان تمرکز کنیم. اما استفاده از پله برای ساختمانهای بلند عملی نیست و آسانسور نیز فضای زیادی را اشغال میکند و پرهزینه است. پس از چه روشی برای جابجایی بین طبقات یک ساختمان استفاده کنیم؟ پژوهشگران یک سامانه راه رفتن عمودی طراحی کردهاند که فضای زیادی را اشغال نمیکند و به هیچ منبع انرژی جز انسان نیاز ندارد.
زمانی در گذشته انسانها از درختان بالا میرفتند و یا از آنها آویزان میشدند. درواقع نیاکان ما میتوانستند به طور رایگان از طریق محیط تقریباً در همه جهات حرکت کنند. اما امروزه اگر بخواهیم در محیطهای بلند و مدرن بالا یا پایین برویم به تجهیزات و فناوریهای خاصی نیاز داریم. پس منصفانه است که بگوییم ما متحول شدهایم.
پله و آسانسور فضای با ارزش داخل ساختمان را اشغال میکنند، پرهزینه و پیچیده هستند و یا نیاز به تعمیر و نگهداری بی پایان دارند. در حال حاضر یک سامانه جدید با نیروی انسان به نام راه رفتن عمودی (Vertical Walking) توسعه داده شده که تنها به ده درصد تلاش مورد نیاز برای بالا رفتن از پلهها نیاز دارد، اما فرد به راحتی میتواند بین تعداد زیادی از طبقهها حرکت کند.
طراحان سامانه راه رفتن عمودی معتقدند در آینده میلیاردها انسان را خواهید دید که به علت افزایش قیمت زمین در مناطق شهری مجبورند در ساختمانها و آپارتمانهای بسیار بلند زندگی کنند. اما آسانسورها فضای گرانبهای ساختمان را اشغال میکنند و پله برای ساختمانهای بیش از چند طبقه عملی نیست. از طرفی با ساختمانهای زیاد، فضای سبز کم و فرصتهای کمتری برای ورزش، به نوعی حرکت فیزیکی منظم ضروری خواهد بود. این جایی است که سامانه راه رفتن عمودی به کار میآید.
سامانه راه رفتن عمودی توسط آزمایشگاه Rombaut Frieling در آیندهوون هلند طراحی شده است. این سامانه با استفاده از یک سیستم ریلی ایجاد شده و ترکیب قرقرهها، طنابها و یک سیستم لغزشی هوشمند اجازه میدهد تا کاربر به صورت تدریجی بین طبقههای یک ساختمان حرکت کند. سازندگان ادعا میکنند که تنها به کمتر از ۱۰ درصد تلاش مورد نیاز برای بالا رفتن از پلهها احتیاج است و هیچ انرژی دیگری مورد نیاز نیست. نمونه اولیه تولید شده توسط طیف گستردهای از مردم، از جمله یک فرد قطع عضو و یک فرد مبتلا به اماس با موفقیت آزمایش شده است.

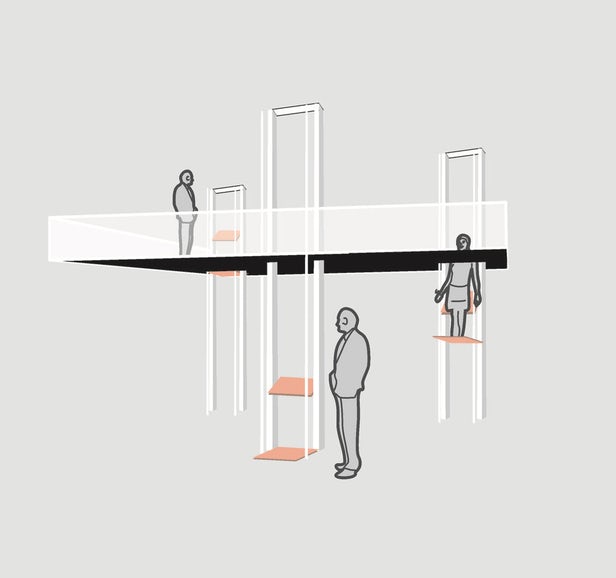
سامانه قدم زدن عمودی نسبت به آسانسور و پلهها فضای کمتری اشغال میکند
فرد در داخل یک واحد مینشیند و واحد به طور منظم با کمک خاصیت ارتجاعی فنر و یک قرقره که سیستم ریلی را تحت فشار قرار میدهد، به طور منظم به طرف بالا کشیده میشود. فرد میتواند حین تلاش کردن و کشیده شدن توسط مجموعهای از قرقرهها و تسمهها، استراحت کند.
پروفسور آلیسون مک گرگور، مدیر گروه صندلی دینامیک زیستی (صندلی بیو دینامیک) در امپریال کالج لندن میگوید: «این سامانه افراد را به حرکت در میآورد، با افراد کمتوان تطبیق پیدا میکند و نیاز به هیچ انرژی ندارد. ما به چه چیزی بیشتر از این نیاز داریم؟»
این سامانه تجربی و عملی توجه طیف وسیعی از نمایشگاههای طراحی، از جمله نمایشگاه اخیر دوسالانه معماری ونیز را به خود جلب کرده است و تاکنون در هفته طراحی در آیندهوون هلند از ۲۲ تا ۳۰ اکتبر به نمایش گذاشته شده است.
این ویدیو سامانه راه رفتن عمودی را در عمل نشان میدهد.


