دستهای پروتز با کمک روش بازخورد حسی، حس لامسه را به افراد قطع عضو باز میگردانند. در نتیجه کاربر میتواند اشیا را با دقت بیشتری در دست بگیرد. مهندسان زیستی تلاش میکنند دست رباتیک با بازخورد حسی طراحی کنند و هماکنون به پیشرفتهایی رسیدهاند. به تازگی، در مجلهی Science Robotics، دو مقاله از دو گروه پژوهشی سوئیسی و ایتالیایی به چاپ رسیده است. این دو گروه پژوهشی در پروژههای جداگانه، بر موضوع دستهای مصنوعی با بازخورد حسی تمرکز داشتهاند. در این مقاله از مجلهی فناوریهای توانافزا و پوشیدنی، به پیشرفتهای دست بیونیک با بازخورد حسی میپردازیم.
اگر شما در کنار خود یک فنجان قهوه داشته باشید، به راحتی و بدون نگاه کردن به فنجان میتوانید آن را در دست بگیرید. شما انحنای دستهی فنجان، میزان لغزندگی رویه سرامیک به کار رفته در آن را در دست خود حس میکنید. برای برداشتن فنجان، انگشت خود را روی دستهی آن قرار میدهید. سپس با حس کردن میزان وزن آن، مقدار فشار لازم برای بلند کردن را تخمین میزنید و در آخر فنجان را به سمت دهان خود هدایت میکنید. اکنون تصور کنید همهی این مراحل برداشتن فنجان را با دست رباتیک انجام دهید. با دست ربایتک هیچ حسی از جنس رویهی فنجان، میزان انحنای دسته و وزن آن نخواهید داشت. شما برای گرفتن دستهی فنجان هیچ اطلاعاتی نخواهید داشت که تا چه مقدار انگشتان خود را جمع کنید. به کارگیری یک دست رباتیک بدون بازخورد حس لامسه همانند کار با یک جوی استیک است نه یک دست واقعی.
مهندسان زیستی تلاش میکنند دست رباتیک با بازخورد حسی طراحی کنند و در این حال به پیشرفتهایی رسیدهاند. به تازگی، در مجلهی Science Robotics، دو مقاله از دو گروه پژوهشی به چاپ رسیده است. این دو گروه پژوهشی در پروژههای جداگانه، بر موضوع دستهای بیونیک با بازخورد حسی تمرکز داشتهاند. در هر دو مقالهی منتشر شده، هر دو گروه از الکترودهای کاشتنی در دست افراد قطع عضو استفاده کردند. الکترودها در عصب زند زیرین و عصب میانی کاشته شدند. سپس با کمک الکترودهای کاشتنی، تحریک اکتریکی دقیق به اعصاب ارسال میشود. با تحریک الکتریکی، اطلاعات دست بیونیک به مغز انسان فرستاده خواهد شد.
عصب زند زیرین یا عصب اولنار (Ulnar nerve) عصبی است که در نزدیکی استخوان زند زیرین سیر میکند. استخوان زند زیرین مچ دست را به ساعد متصل میکند. این عصب پیامها را به انگشت انگشتری و انگشت کوچک میرساند. عصب میانی (Median nerve) از پیوند طناب داخلی و خارجی شبکه بازویی ایجاد میشود. این عصب در تأمین حس دست در نیمه بیرونی و کف دست، نقش داشته و همچنین عصبرسانی بسیاری از ماهیچههای ساعد و دست را برعهده دارد.
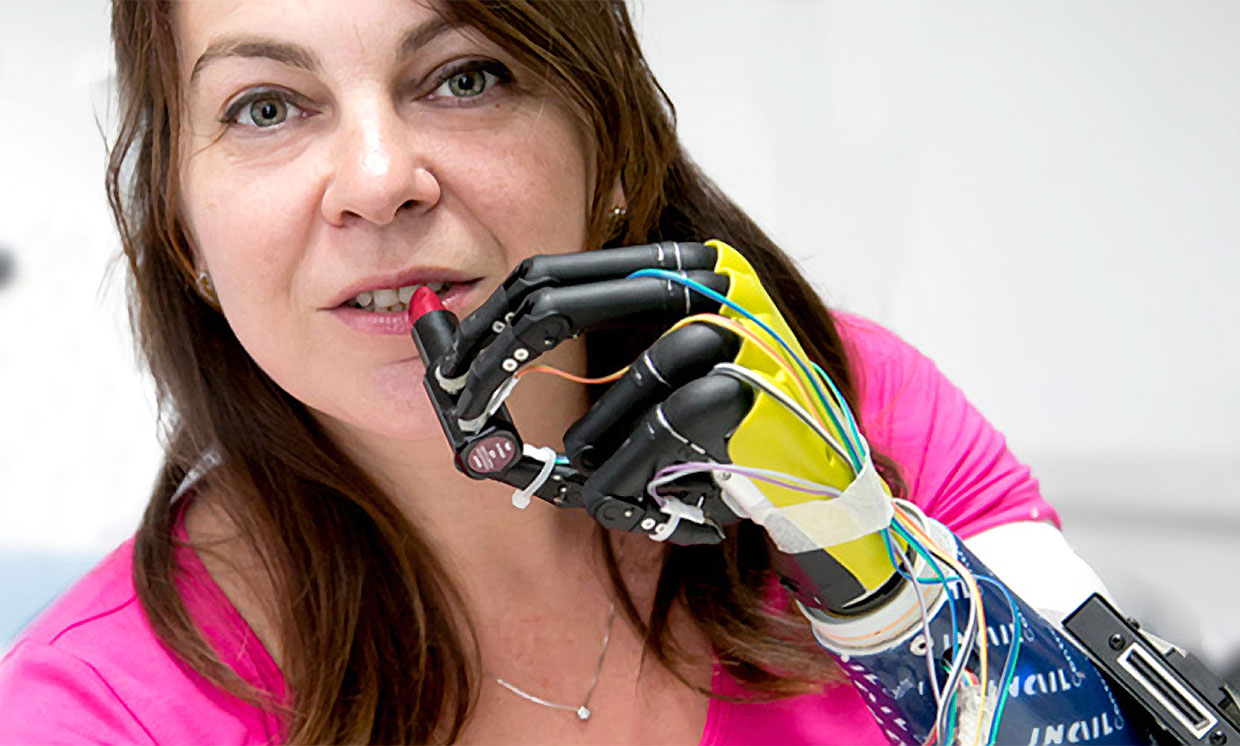
در یکی از پروژهها، دست بیونیک دو حس لامسه و حس موقعیت قرارگیری انگشتان (proprioception) را برای فرد قطع عضو فراهم میکند. در هر دو پروژه، افراد قطع عضو، چهار لوله با قطرهای مختلف را در دست بیونیک گرفتند و توانستند تفاوت اندازهی قطر لولهها را حس کنند. همچنین آنها سختی و نرمی اشیا را با دست بیونیک احساس کردند. ادورادو دآنا (Edoardo D’Anna) و سیلوسترو میسرا (Silvestro Micera)، مهندسان اعصاب مؤسسه پلیتکنیک فدرال لوزان (EPFL) سوییس این مقالهی دست بیونیک با بازخورد حسی را منتشر کردهاند.
در مقالهی دوم، کاربر میتواند اشیا را به خوبی در دست بگیرد و اگر جسم در حال لغزیدن از دست او باشد با واکنش سریع، مانع افتادن جسم شود. لوردانا زولو (Loredana Zollo) و جووانی دی پینو (Giovanni Di Pino) و Eugenio Guglielmelli مهندسان اعصاب دانشگاه بیوپزشکی رم ایتالیا مقالهی دوم را منتشر کردهاند. روش بازخورد حسی (Sensory Feedback) راه اصلی تبدیل دست رباتیک به عضوی از بدن انسان است.
حدود ۳۰ درصد افراد قطع عضو به دلیل سختی کار با دستهای رباتیک بدون بازخورد حسی آن را پس از مدتی کنار میگذارند. دست رباتیک بدون بازخورد حسی همانند یک جسم خارجی است و به عنوان عضوی از بدن احساس نمیشود. در دههی گذشته، پژوهشگران بسیاری بر دست بیونیک دارای بازخورد حسی کار کردند و به پیشرفتهای چشمگیری رسیدند. آنها حسگرهای لمسی توسعه دادهاند که حس وزن جسم و حس لامسه را به فرد قطع عضو باز میگرداند. با این حال، ارتباط دست بیونیک با بدن فرد بسیار دشوار است.
دست بیونیک باید در ابتدا، نیت کاربر را شناسایی کند. یک الگوریتم، سیگنالهای الکتریکی تولیدی از سوی دست بیونیک را هنگامی که فرد قصد میکند دست قطع عضو خود را حرکت دهد، رمزگشایی میکند. بنابراین دست بیونیک از قصد کاربر اطلاع پیدا میکند. مغز کاربر نیز با بازخورد حسی از قصد کاربر آگاه میشود. آیا کاربر میخواهد جسمی را در دست بگیرد؟ چگونه باید حرکت دست بیونیک با قصد کاربر منطبق شود؟ آیا جسم با لمس دست جابهجا میشود؟ حسگرهای موجود در دست بیونیک این اطلاعات را جمعآوری میکنند و الگوریتم اطلاعات را رمزگشایی میکند. اطلاعات رمزگشایی شده به صورت پالسهای تحریک الکتریکی به سامانهی عصبی بدن و در پایان به مغز کاربر میرسد.
زولو و همکارانش سامانهای را ابداع کردهاند که ارتباط دست بیونیک و سامانهی عصبی و مغز کاربر به سرعت انجام میشود. این ویژگی سبب میشود که مغز بتواند تغییر موقعیت قرارگیری جسم در دست بیونیک را برای نمونه در هنگام لغزیدن جسم به سرعت شناسایی کرده و واکنش مناسب نشان دهد و موقعیت دست بیونیک در اطراف جسم را تصحیح کند. برای دستیابی به چنین سامانهای، پژوهشگران ابتدا سیگنالهای تولیدی دست یک فرد سالم را ثبت و سپس از سیگنالهای ثبت شده برای فرد قطع عضو استفاده میکردند.
هنوز مسیر طولانی برای توسعهی یک دست بیونیک که بتواند جایگیزین مناسبی برای دست قطع عضو باشد وجود دارد. حس فضایی، حس موقعیت قرارگیری انگشتان و دست، توانایی گرفتن اشیا بخش کوچکی از طیف وسیع احساسات انسان به شمار میآیند.
در همین زمینه بخوانیم:
>>کنترل دست مصنوعی با حرکت اندام فانتوم
>>ساخت دست رباتیک برای در دست گرفتن اشیای شکننده
>>سامانه جدید دست مصنوعی و بازگرداندن حس لامسه با تحریک عصبها
منبع: spectrum.ieee
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


