در حالی که پیشرفتهای حوزه رباتیک پوشیدنی به بازیابی تحرک برای افراد مبتلا به اختلالات اندام تحتانی کمک کرده است، توانایی روشهای کنونی برای کنترل اسکلتهای بیرونی در ارائه حرکات طبیعی و شهودی برای کاربران محدود است. این میتواند تعادل را به خطر بیندازد و برای کاربر ایجاد خستگی و ناراحتی کند. مطالعاتی بر روی توسعه کنترلرهای قوی متمرکز شدهاند که میتوانند تجربه کاربر را از نظر ایمنی و استقلال بهینه کنند.
تیمی از محققان روش جدیدی را برای کنترل اسکلت بیرونی پایین تنه با استفاده از یادگیری تقویتی عمیق ایجاد کردهاند. روشی با عنوان “کنترل قوی راه رفتن با اسکلت بیرونی توانبخشی پایین تنه همراه با یک مدل اسکلتی عضلانی از طریق یادگیری تقویتی عمیق” منتشر شده در مجله مهندسی عصبی و توانبخشی، کنترل قویتر و طبیعیتر راه رفتن را برای کاربران اسکلت بیرونی اندام تحتانی امکان پذیر میکند.
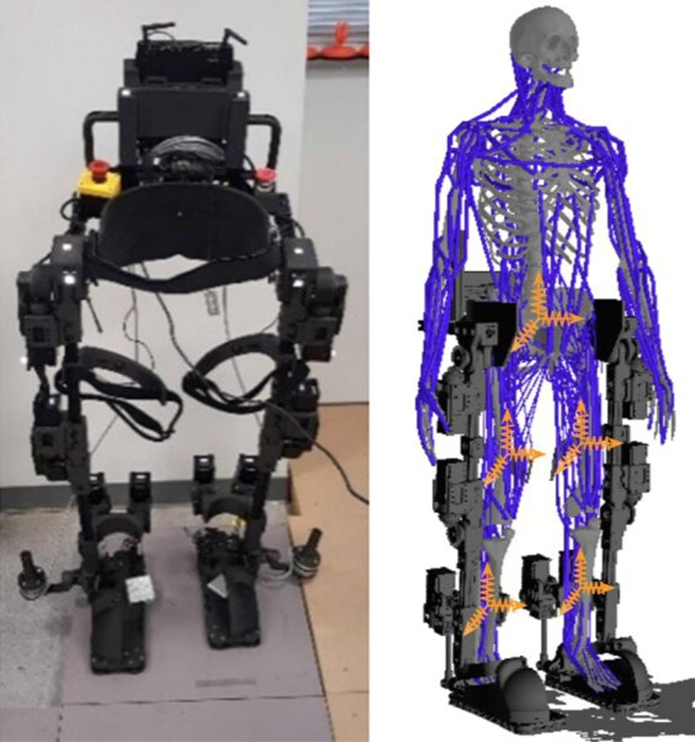
(سمت راست) مدل یکپارچه اسکلتی عضلانی همراه با اسکلت بیرونی. محورهای مختصات زرد، قابهای بوش را نشان میدهند که به طور تصادفی روی LE-RE و مدل انسانی فیکس شدهاند.
بسیاری از اسکلتهای بیرونی پایین تنه که برای کمک به راه رفتن ساخته شدهاند، از طیف وسیعی از روشهای کنترل بهره میبرند. کنترل کنندهها مستقل از جنبههای سختافزاری یا پیادهسازی، در سه سطح بررسی میشوند. سطح پایین (کنترل موقعیت/گشتاور)، سطح میانی و سطح بالا(تشخیص زمین و قصد کاربر). در این سطوح، رویکردهای مختلف برای توصیف هر کنترلکننده شناسایی و ترکیب شدهاند. روشهای شناسایی شده در سطح بالا عبارتند از ورودی دستی توسط کاربر، رابطهای مغزی، یا تشخیص حالت خودکار بر اساس زمین یا حرکات کاربر. در سطح میانی، همگامسازی اغلب بر اساس محرکهای دستی توسط کاربر، رویدادهای گسسته (پیشرفت مبتنی بر زمان)، یا تخمینهای مداوم با استفاده از متغیرهای حالت است. عمل مورد نظر بر اساس مشخصات موقعیت/گشتاور، محاسبات مبتنی بر مدل، یا سایر عملکردهای سیگنالهای حسی تعیین میشود. در سطح پایین، از کنترل کنندههای موقعیت یا گشتاور برای انجام اقدامات مورد نظر استفاده میشود.
ویژگی مهم یک سیستم کنترل این است که باید با وجود تغییر در محیط یا پارامترهای سیستم، پایدار بماند و عملکرد قابل اعتمادی را ارائه دهد. کنترل قوی یک ابزار ضروری در رباتهای اسکلت بیرونی است. برای اطمینان از عملکرد دقیق و درست سیستم با وجود عدم قطعیتها و اختلالات استفاده میشود. مطالعات کمی به طور سیستماتیک کنترلکنندههای قوی برای اسکلت بیرونی توانبخشی را بررسی کردهاند که میتوانند به طور ایمن و موثر به کاربران مبتلا به انواع اختلالات عصبی عضلانی کمک کنند تا با استقلال کامل راه بروند. یکی از چالشهای کلیدی برای توسعه چنین کنترلکننده قویای، مدیریت درجات مختلف نیروهای متقابل اسکلت بیرونی و بیمار است. در نتیجه، کنترلکنندههای راه رفتن معمولی یا مختص شرایط بیمار هستند یا شامل تنظیم بسیاری از پارامترهای کنترلی میشوند که میتوانند غیرقابل اعتماد باشند و حتی تعادل را حفظ نکنند.
تیمی از محققان یک شبکه عصبی عمیق جدید، کنترلکننده قوی مبتنی بر یادگیری تقویتی را برای یک اسکلت بیرونی پایین تنه، بر اساس یک آموزش شبیهسازی اسکلت بیرونی انسان، همراه با سه شبکه مستقل ارائه کردند، که هدف آن راه رفتنی است که در برابر نیروهای مختلف و نامطمئن تعامل انسان و ربات، قابل اعتماد باشد. کنترلکننده اسکلت بیرونی توسط یک سیاست کنترل شبکه عصبی هدایت میشود که بر روی جریانی از سیگنالهای حس عمقی، از جمله حالات سینماتیک مشترک، عمل میکند و متعاقباً کنترل موقعیت لحظهای را برای مفاصل فعال پیشبینی میکند. برای کنترل نیروهای متقابل انسانی، که نامشخص هستند، سیاست کنترل به طور عمدی با یک مدل اسکلتی عضلانی انسانی یکپارچه شده و نیروهای تعامل واقعی انسان و اسکلت بیرونی آموزش داده شده است. دو شبکه عصبی دیگر برای پیشبینی نیروهای تعامل و هماهنگی ماهیچهها به شبکه کنترل متصل هستند. برای افزایش بیشتر استحکام سیاست کنترل در شرایط مختلف انسانی، از تصادفیسازی دامنه در طول تمرین استفاده کردند که نه تنها شامل تصادفیسازی ویژگیهای دینامیک اسکلت بیرونی است، بلکه مهمتر از آن، تصادفیسازی قدرت عضلانی انسان(که برای شبیهسازی تغییرپذیری ناتوانی بیمار است) هم انجام میدهد. پیاده سازی این چارچوب است که یادگیری تقویتی عمیق را ایجاد میکند که با آموزش آن بر روی اسکلت بیرونی توانبخشی پایین تنه آن را قادر میسازد که بدون تنظیم پارامترهای کنترلی، کمک راه رفتن قابل اعتمادی را به بیماران مبتلا به درجات مختلف اختلالات عصبی عضلانی ارائه دهد.
به گفته غیث اندرویس(پژوهشگر ارشد در مرکز تحقیقات مهندسی تحرک و توانبخشی بنیاد کسلر و مدیر آزمایشگاه رباتیک و مرکز تحقیقات توانبخشی)، اسکلتهای بیرونی پایینتنه موجود از فناوریهای مختلفی از جمله عصاها و حسگرهای ویژه برای کمک به حفظ تعادل کاربر استفاده میکنند. اسکلتهای بیرونی که بدون چنین کمککنندههایی کار میکنند، راهرفتن مستقلتری را امکانپذیر میکنند، اما به قیمت اضافه وزن و سرعت پایین راه رفتن.
دکتر اندرویس می گوید:«ضروری است که سیستمهای کنترلی پیشرفتهای برای اسکلت بیرونی پایین تنه توسعه یابد که راه رفتن مستقل را تحت طیف وسیعی از شرایط ممکن سازد. روش جدید توسعه یافته توسط تیم تحقیقاتی از یادگیری تقویتی عمیق برای بهبود کنترل اسکلت بیرونی استفاده میکند. یادگیری تقویتی نوعی هوش مصنوعی است که ماشینها را قادر میسازد طی تجربیات خود از طریق آزمون و خطا آموزش پیدا کنند».
ژیانلیان ژو(استادیار و مدیر بخش آزمایشگاه بایودینامیک در بخش مهندسی زیست پزشکی در موسسه فناوری نیوجرسی NJIT) توضیح می دهد: «ما با استفاده از یک مدل اسکلتی عضلانی کوپل شده با اسکلت بیرونی، حرکات اندام تحتانی را شبیهسازی کردیم و سیستم کنترل اسکلت بیرونی را برای دستیابی به الگوهای طبیعی راه رفتن با استفاده از یادگیری تقویتی آموزش دادیم». ما در حال آزمایش این سیستم در شرایط واقعی هستیم. آزمایش روی اسکلت بیرونی پایین تنه که توسط تیم ما ساخته شده است انجام شد و نتایج آن، بهبود پایداری راه رفتن و کاهش خستگی کاربر را نشان میدهد.
این تیم تحقیقاتی مشخص کرد که مدل پیشنهادی آنها یک کنترلکننده جهانی برای راه رفتن تولید میکند که قادر به مدیریت تعاملات انسان و اسکلت بیرونی در سطوح مختلف بدون نیاز به پارامترهای تنظیم است. سیستم جدید این پتانسیل را دارد که برای طیف وسیعی از کاربران از جمله افرادی که آسیب نخاعی، ام اس، سکته مغزی و سایر بیماریهای عصبی دارند، سودمند باشد. محققان قصد دارند به آزمایش واقعی سیستم با کاربران ادامه دهند و الگوریتم های کنترلی آن را برای بهبود عملکرد راه رفتن اصلاح کنند.
دکتر اندرویس میگوید: «ما در مورد پتانسیل این سیستم جدید برای بهبود کیفیت زندگی افراد مبتلا به اختلالات اندام تحتانی هیجان زده هستیم. ما امیدواریم با فعال کردن الگوهای راه رفتن طبیعی و شهودیتر، به کاربران اسکلت بیرونی کمک کنیم تا با راحتی و اطمینان بیشتری راه بروند.
>> اسکلت بیرونی هوشمند برای توانبخشی آسیب نخاعی
>> خطرات استفاده از اسکلت بیرونی
منبع: medicalxpress.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


