دانشمندان دانشگاه هاروارد با استفاده از مواد سادهای مانند نیهای نوشیدنی ربات نیم نرمی (semi-soft) ساختهاند که مانند حشرات حرکت میکند. برای آشنایی با این پژوهش با مجلهی فناوریهای توان افزا و پوشیدنی همراه باشید.
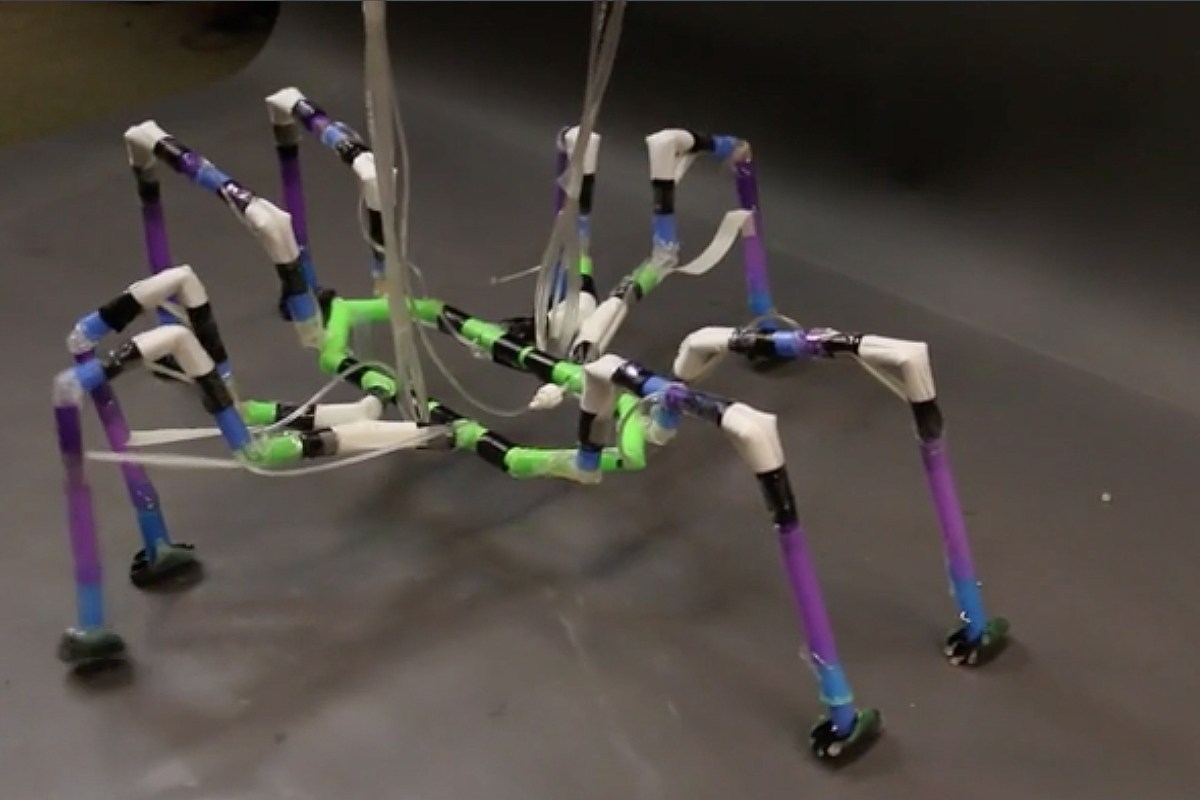
پروفسور Whitesides و Alex Nemiroski از دانشگاه هاروارد با الهام از حشرات و عنکبوتها و با استفاده از نیهای نوشیدنی نوعی ربات نیمنرم ساختهاند که توانایی ایستادن و راه رفتن دارد. آنها همچنین یک آبپیمای رباتیکی (water strider) ساختهاند که میتواند روی سطح مایعات حرکت کند. نتایج مربوط به ساخت این رباتها به تازگی در مجلهی Soft Robotics منتشر شده است.
برخلاف نسل قبلی رباتهای نرم که به سختی و با کمک محفظههای هوای داخلشان قابلیت ایستادن و راه رفتن داشتند، رباتهای جدید طوری طراحی شدهاند که چابکتر باشد. با این که برای به کار بردن این رباتها در دنیای واقعی صرف زمان زیادی لازم است، پژوهشگران امیدوارند که در نهایت بتوان از آنها در عملیاتهای جست و جو در حوادث طبیعی استفاده کرد.
Whitesides، پروفسور دانشگاه هاروارد گفت «موجودات چابک بسیاری همانند عنکبوتها و حشرات در جهان وجود دارند. آنها میتوانند سریع حرکت کنند و از مکانهای مختلفی بالا بروند. این موجودات قادرند کارهایی انجام دهند که رباتهای سخت به خاطر وزن زیاد و ویژگیهای ظاهریشان قابلیت انجام آن را ندارند. حشرات نمونهای از تطبیقپذیرترین موجودات جهان هستند. سوال اصلی ما این بود: چگونه میتوان چیزی شبیه به آنها ساخت؟»
فرآیند طراحی و ساخت
Nemiroski گفت «ما فهمیدیم که نسبت استحکام به وزن لولههای پلیپروپیلن (polypropylene) بسیار عالی است. به این معنا که میتوان با آن چیزی تولید کرد که در مقایسه با رباتهای نرم پشتیبانی ساختاری بیشتری داشته باشد. بنابراین نیهای نوشیدنی را به عنوان اجزای سازندهی رباتها انتخاب کردیم. سپس با الهام از بندپایان فهمیدیم که چگونه میتوان یک مفصل ساخت و چه طور باید این نیها را به هم متصل کرد تا یک اسکلت به دست بیاید. »
این پژوهشگران با ایجاد شکافهایی در نیها به آنها قابلیت خم شدن دادند. سپس لولههای کوتاهی را به آنها وارد کردند که زمانی که منبسط میشد، مفصلها را باز میکرد. یک تاندون (tendon) لاستیکی نیز به سمت دیگر وصل شده بود که با منقبض شدن لوله مفصل را به حالت اولیه بازمیگرداند.
با استفاده از این روش ساده، این گروه رباتی با یک پا ساختند که قادر به خزیدن و بالا رفتن از موقعیتهای پیچیده بود. آنها سپس با اتصال پاهای دوم و سوم ربات، به آن توانایی ایستادن دادند.
Nemiroski گفت «در هر سطح جدید از پیچیدگی که به سامانه اضافه میشد ما مجبور بودیم اصلاحاتی روی ساختار اصلی اتصالات انجام دهیم تا بتواند فشار بیشتری را تحمل کند و قابلیت پشتیبانی رباتهای بزرگتر و با وزن بیشتر را داشته باشد. زمانی که رباتهای شش پا یا هشت پا را ساختیم، برنامه نویسی آنها برای حرکت کردن چالش بزرگی بود. ما با الهام از حرکات اندامهای بندپایان، حرکات مورد نیاز برای توسعهی راه رفتن ربات را دریافت میکردیم. »
توسعهی سامانهی کنترل ربات
Nemiroski و همکارانش توانستند حرکات ربات را به کمک یک سرنگ و به صورت دستی کنترل کنند. زمانی که طراحی پیچیدهتر شد، آنها از رایانه برای کنترل ترتیب حرکات استفاده کردند. Nemiroski گفت «ما برای کنترل حرکات از یک میکروکنترلر، یک برد آردوینو(arduino)، تعدادی دریچه (valve) و یک کمپرسور مرکزی استفاده کردیم.»
Nemiroski و همکارانش موفق شدند که طرز راه رفتن مورچهها را بر روی ربات شش پای خود اجرا کنند. اما اجرای نوع راه رفتن عنکبوتها بر روی ربات به مراتب پیچیدهتر بود.
Nemiroski گفت « عنکبوت با استفاده از منبسط و منقبض کردن مفصلهایش زمان بندی حرکت اعضای بدنش را به سمت جلو و عقب تنظیم میکند و به این واسطه توانایی تغییر سرعت حرکت خود را دارد. اما مفصلهای ربات ما به خاطر سادگی سامانهی دریچههای استفاده شده در آنها، تنها دو حالت دارد. یک حالت برای تنظیم فشار منبع به طوری که حباب داخل مفصل را باد کند که در نتیجهی آن عضو باز خواهد شد و حالت دیگر که وظیفهی منقبض کردن حباب و بازگرداندن عضو را بر عهده دارد. بنابراین در مورد ربات هشت پا ما باید طرز راه رفتن جدیدی که با سامانهی دو حالتی مفصلهای ربات سازگار باشد، توسعه میدادیم. ما نمیتوانیم دقیقا طرز راه رفتن عنکبوت را بر روی این ربات اجرا کنیم.»
Nemiroski گفت توسعهی سامانهای که بتواند سرعت حرکت پاها را به خوبی تنظیم کند، هدف مفیدی برای پژوهشهای آینده خواهد بود.
بیشتر بخوانید:
>>ساخت رباتهای سریع و چابک با الهام از طبیعت
>>ساخت یک ربات عنکبوتی با استفاده از چاپ سه بعدی
منبع: news.harvard
استفاده و بازنشر این نوشتار تنها با ذکر لینک منبع و نام «مجلهی فناوریهای توان افزا و پوشیدنی» مجاز است.


