رقابت برای ایجاد بهترین محصول اسکلت بیرونی، به آرامی از یک مسابقه برای بهترین سخت افزار به مسابقهای برای بهترین نرم افزار تغییر مییابد. درنهایت ممکن است تمام دستگاهها به اهداف مشخص شده دست یابند اما عامل تمایز بین آنها از سخت افزار به اینکه کدامیک دارای نرمافزار بهتر و معماری قابل اعتمادتر است، تبدیل میشود. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
مرز پژوهشهای توسعه اسکلت بیرونی از سخت افزار به نرم افزار در حال تغییر است. همانطور که در زمینه سخت افزار کدامیک کار میکند و کدام کار نمیکند واضح میشود، نرم افزار کنترل و ارزیابی دستگاههای اسکلت بیرونی به نقطه تمرکز جدید تبدیل میشود. اخیراً پیشرفتهای زیادی در نرم افزار اسکلت بیرونی صورت گرفته است:
- برنامه کاربردی Active Pelvis Orthosis: کنترل تعادل
- بهینه سازی انتقال قدرت (Optimized Power Transfer)
نرم افزار اسکلت بیرونی برای کنترل تعادل
EPFL یک ویدیو منتشر کرده است که برخی از پیشرفتهای خود در پروژه CYBERLEGs با تأمین مالی اتحادیه اروپا را نشان میدهد. تاکنون اسکلتهای بیرونی و پروتزهای فعال در شرایط لغزش به جای کمک موجب افزایش احتمال سقوط کاربر میشدند. البته این مخالف آن چیزی است که تولیدکنندگان اسکلت بیرونی میخواهند اتفاق افتد. در حالت ایده آل کوله پشتی، بویژه برای سالمندان، باید به کاربر برای حفظ تعادل کمک کند.
در حالی که بیشترین تلاش توسعه دهندگان اسکلت بیرونی در آسیا بر روی کمک به نیروی کار مسن متمرکز شده است و در ایالات متحده برای تولید محصولات موفق تجاری، پژوهش در اتحادیه اروپا بر فهم سقوط و تعادل متمرکز شده است.
کارهای بسیاری باقی مانده که توسعه دهندگان نرم افزار اسکلت بیرونی باید انجام دهند. در حال حاضر Active Pelvis Orthosis تنها یک اسکلت بیرونی مفصل ران است. هدف نهایی این است که این دستگاه تبدیل به یک اسکلت بیرونی کامل بدن با معماری نرم افزاری پیچیده شود که توانایی واکنش صحیح به از دست دادن تعادل کاربر را دارد.
نرم افزار اسکلت بیرونی برای بهینه سازی انتقال قدرت
Karl Zelik، استادیار دانشگاه وندربیلت میگوید: «این کار براساس همکاری ما با مهندسان بیومکانیک در دانشگاه وندربیلت و رباتیک پوشیدنی در دانشگاه هاروارد است. اسکلت بیرونی رباتیک یک فناوری جالب و امیدبخش است، اما انسانها پیچیده هستند و برای ماکزیمم کردن مزایای سلامتی و عملکرد اسکلتهای بیرونی ما باید نحوه انتقال قدرت از دستگاههای کمکی برای تقویت جنبش انسانی را اندازهگیری، درک و بهینه سازی کنیم. درست همانطور که یک موتور خودرو تنها زمانی مفید است که قدرت تولیدیش بتواند به طور مؤثر از طریق سامانه انتقال موجب حرکت خودرو شود، اسکلتهای بیرونی نیز تنها زمانی مفید هستند که قدرت تولید شده آن بتواند به طور مؤثر برای کمک به کاربر انسانی انتقال یابد».
این پژوهش دو جزء دارد، یکی سخت افزار است: چگونگی اتصال اسکلت بیرونی به بدن انسان و دیگری کنترل نرم افزاری: چه زمانی و چقدر نیرو باید اعمال شود؟
سامانه مکاترونیک سامسونگ برای بهبود گام برداشتن (GEMS)
سامسونگ، که چندین ثبت اختراع اسکلت بیرونی دارد همچنان در این زمینه پر کار است. پژوهشگران دو مقاله را بر اساس یک اسکلت بیرونی فعال ران در ICORR 2017، پانزدهمین کنفرانس بینالمللی رباتیک و توانبخشی IEEE که در لندن برگزار شد، ارئه دادند. شما میتوانید تمام مقالات ارائه شده را مشاهده کنید، توجه کنید که تعداد زیادی از آنها مربوط به اسکلت بیرونی هستند: برنامه فنی ICOR 2017.
آزمایشگاه مکاترونیک سامسونگ در مؤسسه فناوری پیشرفته سامسونگ GEMS را توسعه داد و پژوهش جدید نشان میدهد که این اسکلت بیرونی نه تنها میتواند تا ۱۳ درصد هزینه متابولیسم راه رفتن بر روی تردمیل را کاهش دهد بلکه کنترل زمانی کاملاً بهینه شده است. لازم به ذکر است که این بهینهسازی در حال حاضر تنها تحت یک تا چهار شرایط انجام میشود (برای نمونه: سرعت ثابت بر روی یک تردمیل). سامانههای کنترل آینده باید قادر به تغییر زمان خروجی موتور برای تغییر سطح زمین، شیب و شرایط سطح باشند. این مطمئناً یک کار دشوار خواهد بود!
گروه سامسونگ با توسعه GEMSv2، که برای استفاده در دامنهها بهینهسازی شده، به چالش تغییر شیب پاسخ میدهد. نتیجه اولیه این گروه پژوهشی این است که اسکلتهای بیرونی ران روی سطوح شیبدار رو به بالا مؤثرتر هستند.
دیگر پیشرفتها:
اما تنها آزمایشگاههای پژوهشی نیستند که موجب پیشرفت نرم افزار اسکلت بیرونی شدهاند. شرکتها نیز به برخی نقاط عطف دست یافتهاند:
- H-WEX همراه با یک نرم افزار گوشی، تغییر قدرت خروجی هنگام حرکت را کنترل میکند.
- نرم افزار واقعیت مجازی بیشتر با حسگرها و دستگاههای پوشیدنی پیوند خورده است (نگاه کنید به: توانبخشی فیزیکی با اسکلت بیرونی و واقعیت مجازی)
- Ekso Bionics یک سامانه ابری بیسیم راه اندازی کرده است که میتواند تمامی دادههای مربوط به عملکرد اسکلت بیرونی و نرم افزار مدیریت کنترل را روی ابر ذخیره کند.
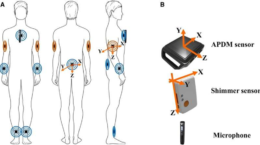
- StrongArm Tech یک سامانه حسگر پوشیدنی راهاندازی کرده است که میتواند سینماتیک و عملکرد کاربر همراه با و بدون سامانه ارگونومیک را ارزیابی کند.
- Wandercraft با ایجاد یک اسکلت بیرونی کمکی برای راه رفتن پویا در حال پیشرفت است.
- اسکلت بیرونی گام برداشتن ARKE هم اکنون با کنترل صوتی Alexa برجسته شده است.
منبع: exoskeletonreport
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»