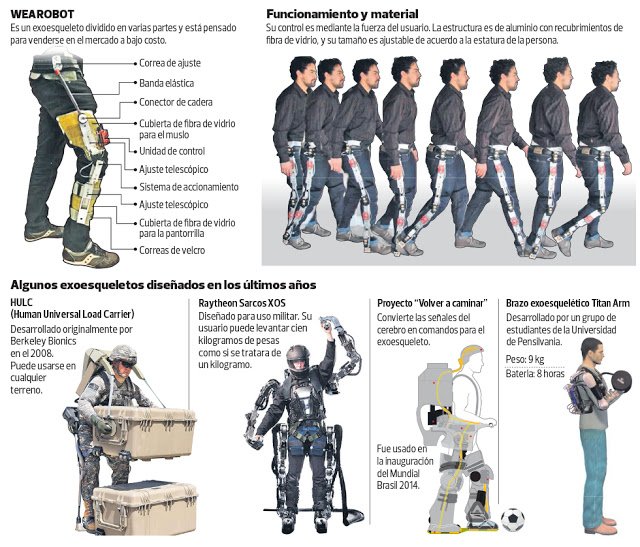
پژوهشگران در شرکت WeaRobot نوعی اسکلت بیرونی ساختند که میتواند به بخشهای کوچکتری تقسیم شود و برای کمک به حرکت هر مفصل به طور جداگانه مورد استفاده قرار گیرد. هدف پژوهشگران از این کار مقرون به صرفهتر و کاربردیتر شدن اسکلت بیرونی برای همه افراد به ویژه سالمندان است.
شرکت WeaRobot قصد دارد اسکلتهای بیرونی رباتیک را به شکل مدولار در آورد تا مقرون به صرفهتر باشد و بیشتر در دسترس مردم قرار گیرد. اسکلت بیرونی مدولار میتواند به حرکت یک به یک مفصلها کمک کند. بنابراین میتوان تنها حمایت حرکت یک زانو یا یک آرنج را داشت و یا تمام ماژولهای یک اسکلت بیرونی کامل بدن را سرهمبندی و از آن استفاده کرد. این شرکت بهبود حرکت و عملکرد جمعیت روبه رشد سالمندان را مورد هدف قرار داده است.
شرکت WeaRobot با از هم جدا کردن بخشهای مختلف اسکلت بیرونی رباتیک قصد دارد آن را مقرون به صرفه تر و سازگارتر کند.
اسکلت بیرونی رباتیک، لباسی الکترومکانیکی است که میتواند به افراد معلول فرصتی برای راه رفتن دوباره بدهد. لباس کامل بدن نتایج قابل توجهی مانند آموزش قسمتهای خاموش بدن برای حرکت خود به خود دوباره را دارد. اما آنها گران قیمت هستند و هزینهای بین ۴۰،۰۰۰ تا بیش از ۱۰۰،۰۰۰دلار دارد. در حال حاضر یک استارتآپ رباتیک مکزیکی در حال شکستن اسکلت بیرونی به قطعات کوچکتر، با هدف مقرون به صرفهتر و سازگارتر کردن این فناوری پزشکی است.
ارنستو رودریگرز (Ernesto Rodriquez Leal) در سال ۲۰۱۴، زمانی که یک معضل شخصی الهام بخش وی شد تا پژوهشهای رباتیک خود را عملی کند، شرکت WeaRobot را تأسیس کرد. پدر او پس از یک دوره کاری ۳۵ ساله به عنوان کارگر فولاد شروع به از دست دادن قدرت حرکت خود کرد و پس از چند عمل جراحی و ۳۰۰۰ ساعت توانبخشی، هنوز هم راه رفتن و حرکت دستها برای وی دشوار بود.
اسکلت بیرونی پتانسیل حل مسائل مربوط به حرکت را دارد، مسائلی که پدر ارنستو و میلیونها نفر دیگر به علت تروما، سکته مغزی، پیری و دیگر شرایط پزشکی با آن روبرو هستند.
چشم انداز WeaRobots گسترش یافته و شامل اطفال نیز شده است. کودکان برای کمک به بهبودی از تروما و یا شرایط پزشکی دیگر مانند اسکولیوز (انحراف ستون مهره) به اسکلت بیرونی نیاز دارند. تصادفاً دختر هالورسون دارای شکل حادی از اسکولیوز است و پس از چهار عمل جراحی، او مجبور به پوشیدن آتل محکم و سنتی کمر است.
هالورسون امیدوار است که WeaRobot بتواند یک بهبود بزرگ برای بچههایی با شرایط مشابه باشد. او میگوید: «من فکر میکنم آنچه که ارنستو در حال ساخت آن است میتواند پشتیبانی فیزیکی فراهم آورد و همچنین محدوده حرکتی و انعطاف پذیری را افزایش دهد. تقسیمبندی این اسکلت بیرونی به بخشهای کوچکتر و قابلیت استفاده برای بچهها و اندامهای مختلف مزیت بزرگی است که آن را برای همه موقعیتها و شرایط کاربردی میکند». همچنین این اسکلت بیرونی دارای یک سیستم کنترل منحصر به فرد است.
معمولاً مفاصل اسکلت بیرونی، سیستمهای دندهای سفت و سختی برای افزایش گشتاور دارد. الکترودهای متصل به پوست کاربر سیگنالهای دریافتی از عضلات بدن را جمعآوری میکند. ارنستو توضیح میدهد: «با استفاده از الگوریتمهای هوش مصنوعی، ما میتوانیم شرایطی که کاربر نیاز به کمک گشتاور از مفاصل خاص دارد را تعیین کنیم».
تمرکز فعلی این پروژه کمک به افراد با مسائل مربوط به حرکت است اما در آینده، طراحی مشابه میتواند برای درمان فیزیکی یا آموزش ورزشی مورد استفاده قرار گیرد. ارنستو میگوید: «اسکلت بیرونی با حسگرها بستهبندی شده است، بنابراین شما میتوانید از فعالیت، موقعیت و جهتگیری هر مفصل به تنهایی در بدن آگاه شوید»
این طراحی به منظور آسانتر شدن حرکت برای مردم ایجاد شده، اما میتوان با پیکربندی مجدد عکس این را انجام داد. میتوان اسکلت بیرونی را غیر فعال ساخت تا به جای کمک به حرکت فرد، آن را محدود کند و یا میتوان از آن به عنوان یک تمرین آموزشی با فناوری بالا برای ورزشکاران و یا حتی به عنوان یک درمان برای فضانوردانی که نیاز به شبیهسازی گرانش و وزن در فضا دارند، استفاده کرد.
برای اطلاعات بیشتر میتوانید سخنرانی TEDx ارنستو درمورد پژوهشهای رباتیک خود و گروهش را ببینید.


منبع: nextbigfuture.com


