WalkON Suit یک اسکلت بیرونی فعال است که توسط گروه SG Robotics توسعه یافته است. این اسکلت بیرونی توانست در رقابتهای Cybathlon2016 در بخش اسکلتهای بیرونی فعال مدال برنز را کسب کند. در ادامه با این اسکلت بیرونی بیشتر آشنا میشویم. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

رقابت اسکلت بیرونی فعال در Cybathlon 2016 شامل بخشهای چالش برانگیزی بود. در این رقابت یک کاربر پاراپلژیک میبایست روی سطح زمین، سطح شیبدار و روی پلهها راه برود، بایستد و بنشیند، بر روی سنگها گام بردارد و حتی از یک مسیر کج (شیب به طرفین) عبور کند. همه این وظایف باید توسط یک اسکلت بیرونی فعال که برای کمک به فعالیتهای روزمره زندگی افراد پاراپلژیک طراحی شده، انجام میشد. هر گروه شرکت کننده در این رقابتها از فناوریهای منحصربفردی برای دستیابی به این اهداف بهره برده بود. گروه SG Robotics که پیش از این SGMechatronics نامیده میشد و دارنده مدال برنز این رقابتها است، یک اسکلت بیرونی فعال به نام WalkON Suit را برای شرکت در Cybathlon 2016 توسعه داد. WalkOn Suit برای انجام تمام این وظایف، بر اساس چندین تکنیک طراحی و کنترل خاص توسعه یافته بود، همچون مکانیسم تحریک هیبریدی، یک سامانه انتقال دو مفصله و محرکهای توزیع.

یک مقاله ۱۲ صفحهای توسط IEEE Robotics and Automation Society در مورد WalkON Suit منتشر شده است. WalkON Suit یک اسکلت بیرونی فعال است و کاربری را که از میان تنه (کمر) کاملاً فلج است را قادر میسازد دوباره راه برود، بنشیند و از پلهها بالا و پایین رود. WalkON Suit توسط SG Robotics و با همکاری دانشگاه Sogang ساخته شده است و دولت کره نیز از آنها پشتیبانی میکند.
Cybathlon از دیگر رویدادهای رباتیک پوشیدنی به دلیل تأکید بر فعالیتهای روزمرهای که افراد معلول با آن روبرو هستند، متفاوت است. رقابت اسکلت بیرونی فعال شامل بخشهای زیر بود:
نشستن روی نیمکت مبلی: این خیلی سخت تر از آن چیزی است که به نظر میرسد، زیرا نیمکتهای انتخاب شده در این رقابت بسیار به زمین نزدیک (دارای ارتفاع کم) و کاملاً نرم بود. درجه آزادی مورد نیاز این آیتم برای برخی اسکلتهای بیرونی و کاربران آنها فراتر از حد مورد انتظار بود.
حرکت زیگ زاگ: چالشی برای بیشتر اسکلتهای بیرونی که حرکت موتوری را تنها در یک جهت انجام میدهند. تغییر جهت معمولاً به صورت دستی و با عصا انجام میشود.
قدم زدن روی سنگها: یک چالش بسیار دشوار و برای کنترل طول قدمها است.
حرکت روی سطحی که به طرفین شیب دارد: بیشتر دستگاهها تنها بر حرکت روی سطح صاف تمرکز دارند. تنظیم برای شیب جانبی با افزایش مرکز جاذبهی کاربر معلول، به علت از دست دادن جرم پایین تنه، سختتر هم میشود.
بالا رفتن از سطح شیبدار، بالا و پایین رفتن از پله.
باز و بسته کردن یک در.
حرکت بدون اپراتورهای پشتیبانی: کاربران مجبور بودند ماشینهای پوشیدنی را خود کنترل کنند.

طراحی WalkON Suit
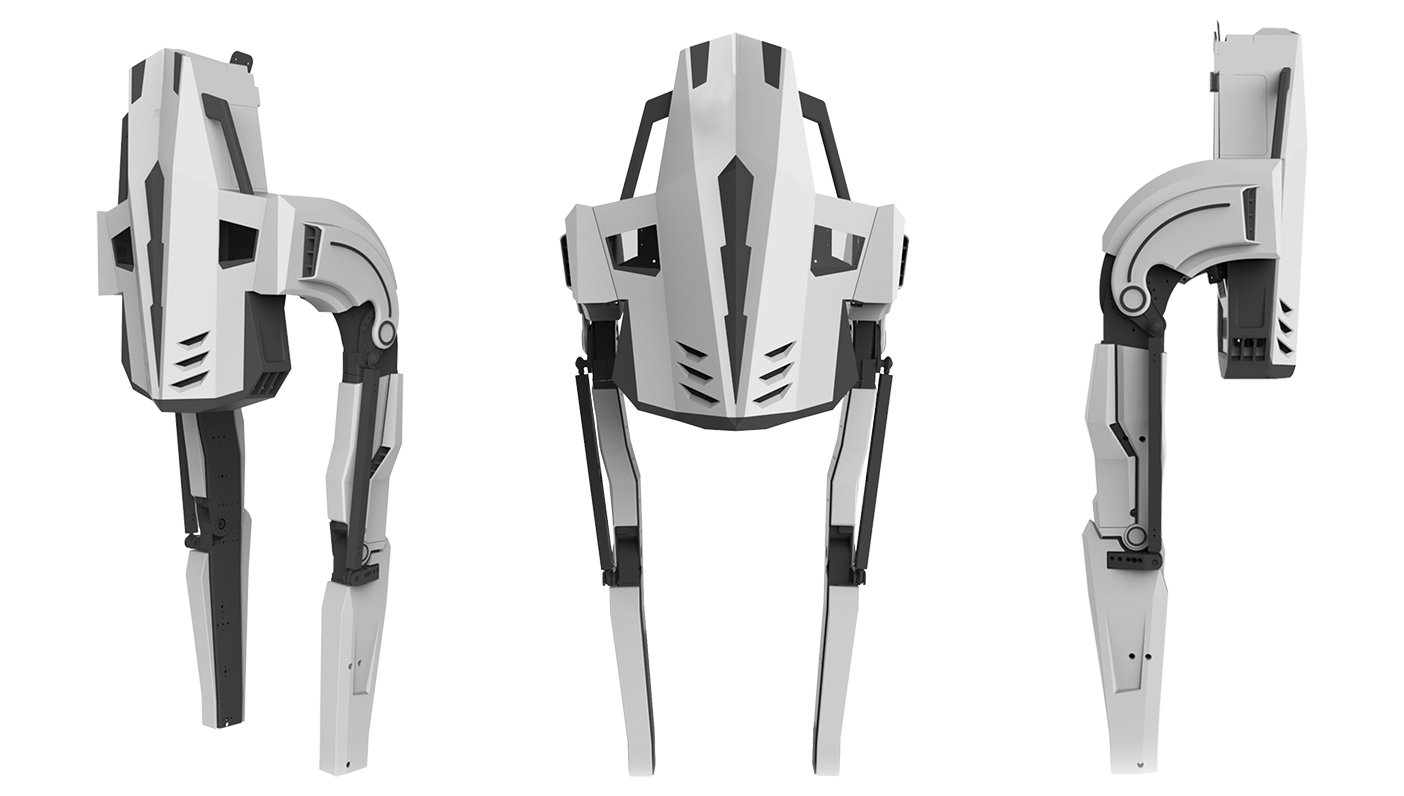
سامانه WalkON Suit شامل یک جفت سامانه محرک، یک جفت پای رباتیک، یک کوله پشتی که شامل واحد کنترل و باتریها است، یک جفت عصا و یک نمایشگر است. ملزومات سامانه محرک بر اساس قدرت مورد نیاز برای حرکت ایستادن و نشستن مشخص میشود. انرژی مورد نیاز توسط گشتاور عضلانی ران و زانو، وزن کاربر و اسکلت بیرونی مشخص میشود. گروه WalkON Suit از چهار موتور الکتریکی برای بکار انداختن هر مفصل استفاده کرد که نه تنها یک نیروی محرک بزرگ فراهم میکرد بلکه خطر از کار افتادن موتور را کاهش میداد.
مفصل رانها در WalkON Suit به طور مستقیم توسط موتورها فعال میشد درحالی که مفاصل زانو توسط یک مکانیسم اتصال کار میکرد. این اتصال بین کوله پشتی و ساق پا برقرار بود. در این مکانیسم حرکت زانو برخلاف ران وابسته به دو مفصل است. مکانیسم وابسته به دو مفصل در برخی حرکات خاص نیروی بزرگتری با گشتاور کمتر موتور تولید میکند و موجب بهبود بازده انرژی میشود.
انرژی WalkON Suit توسط چهار باتری جداگانه تأمین میشد و کاربر از عصا برای حفظ تعادل خود بهره میبرد. همچنین کاربر از طریق نمایشگر کوچکی که روی شکم نصب شده بود میتوانست بر وضعیت کنترل WalkON Suit نظارت داشته باشد.
یکی از مهمترین موضوعات برای حفظ تعادل و پایداری هنگام راه رفتن با اسکلت بیرونی فعال، کنترل مرکز ثقل است. اگر مرکز ثقل به خوبی کنترل نشود اسکلت بیرونی تعادل خود را از دست میدهد حتی با وجود عصا. افراد پاراپلژیک ممکن است سالهای بسیاری از پاهای خود استفاده نکرده باشند. به همین دلیل وزن پایین تنه آنها بسیار سبکتر از وزن بالا تنه است و همه وزن آنها در بالا تنه متمرکز شده است. از طرفی وزن اسکلت بیرونی نیز به دلیل مکانیسم وابسته به دو مفصل (برای حرکت مفصل زانو) در قسمت میان تنه (کمر) متمرکز شده است. بنابراین میتوان مرکز ثقل یک فرد پاراپلژیک را نزدیک به مرکز بالا تنه در نظر گرفت.
ویژگیهای برجسته WalkON Suit
گروه WalkON Suit توانست تمام چالشهای رقابت Cybathlon را به صورت فیزیکی تکمیل کند به استثنای شیب جانبی. نکته حائز اهمیت در مورد این اسکلت بیرونی استفاده از چهار موتور کوچک الکتریکی برای هر مفصل بود.
یکی دیگر از گزینههای جالب مهندسی گروه SG، استفاده از یک ارتز پا بود که به کاربر و به نوبه خود به اسکلت بیرونی متصل میشد. ایده داشتن یک لباس یا بریس که به طور خاص طراحی یا اصلاح شده و برای اتصال بین کاربر و ربات پوشیدنی مورد استفاده قرار میگیرد، جدید نیست. اما در عمل به ندرت مورد استفاده قرار میگیرد. یکی از مسائل اصلی در استفاده از اسکلتهای بیرونی فعال، ایجاد نقطههای فشار و آسیب پوست به علت حرکت اجزا روی بدن است. یکی از استراتژیها این است که یک اسکلت بیرونی بسیار قابل تنظیم ایجاد کنیم که به راحتی بر روی کاربر قرار میگیرد. استراتژی دیگر، که توسط شرکتهای همچون Myomo برای اسکلتهای بیرونی بازو مورد استفاده قرار میگیرد، ایجاد یک بریس سفارشی برای هر کاربر است. سپس اجزای اسکلت بیرونی را به آن متصل میکنیم. استراتژی سوم این است که کل فرآیند اسکلت بیرونی را کنار بگذاریم و ربات پوشیدنی را به یک لباس بیرونی (exosuit) کاهش دهیم که منحصراً از مواد نرم ساخته شده است.
گروه WalkON گزارش میدهد که تجربه و آسایش کاربر با اسکلت بیرونی فعال توسط سرعت راه رفتن و مصرف انرژی محدود شده است. این دقیقاً مشابه موارد تجاری ReWalk است که تأکید میکند یک کاربر با یک ماه تجربه و یک کاربر با پنج سال یا بیشتر قابلیتهای متفاوتی را از خود نشان میدهند. این موضوع بر خطر انتخاب یا ارزیابی یک اسکلت بیرونی توانبخشی بر اساس یک بار یا دو بار پوشیدن آن تأکید دارد.
کلام آخر
بیش از یک سال از برگزاری رقابت Cybathlon میگذرد اما الهام بخشیدن به مهندسین، پژوهشگران و پزشکان برای به اشتراک گذاشتن تجربیات خود همچنان ادامه دارد. Cybathlon با برجسته کردن چالش فعالیتهای روزمره افراد مبتلا به فلج کامل پایین تنه موفق عمل کرد.
بیشتر بخوانیم:
>>پایان یک رقابت منحصر بفرد: Cybathlon 2016 المپیک سایبورگ ها
>>آشنایی با تیمهای شرکت کننده در بخش اسکلت بیرونی رقابت Cybathlon
منبع: exoskeletonreport
استفاده و بازنشر این نوشتار تنها با ذکر لینک منبع و نام «مجلهی فناوریهای توان افزا و پوشیدنی» مجاز است.


