پیشتر در مورد رقابتهای رباتیکی DARPA مطلبی منتشر کردیم. در این رقابتها برخی از گروهها از رباتهای ATLAS ساخت DARPA استفاده کردند. گروههایی نیز ترجیح دادند تا از نمونههای موجود رباتها (مانند HUBO و HRP-2) در دور نهایی استفاده کنند. در این میان برخی از گروهها نیز ترجیح دادند تا خود ربات جدیدی بسازند. یکی از این گروهها WALK-MAN از مؤسسه فناوری ایتالیا (IIT) است که دو ربات HyQ و COMAN از جمله آخرین ساختههای آنهاست. Nikos Tsagarakis پژوهشگر ارشد IIT و هماهنگ کنندۀ پروژۀ WALK-MAN پیش از عزیمت به محل برگزاری رقابتها در کالیفرنیا دربارۀ ربات سفارشی سازی شدۀ گروه خود، تواناییهای اصلی آن و مقایسۀ آن با ATLAS با ما به گفتگو نشست.
– آیا برای طراحی و ساخت WALK-MAN از رباتهای دیگری الهام گرفتید؟ از کدام رباتها؟
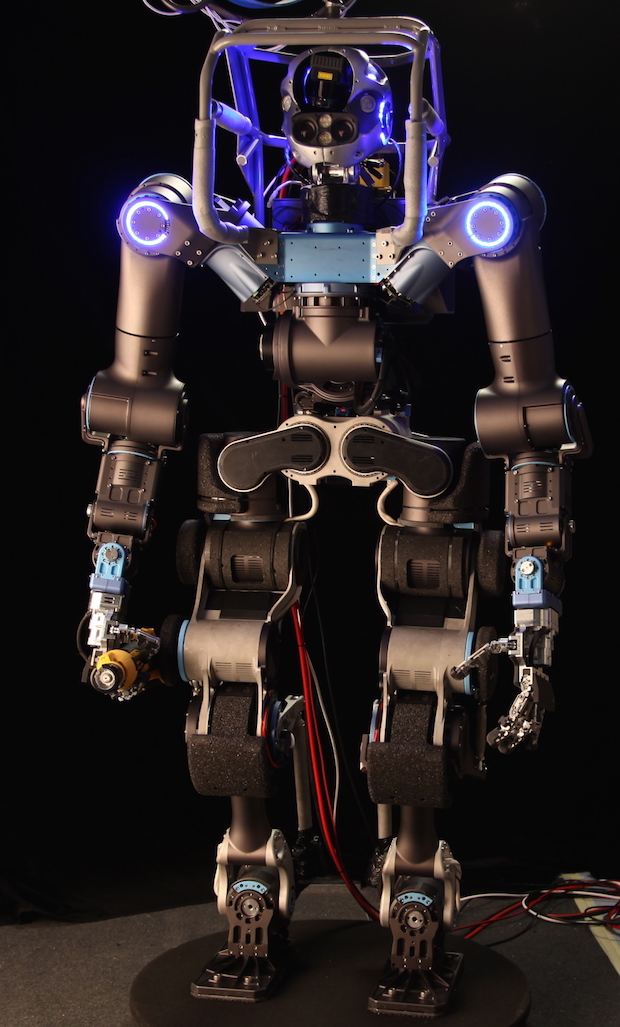
ربات WALK-MAN به عنوان بخشی از پروژۀ WALK-MAN که تحت حمایت و سرمایهگذاری اتحادیۀ اروپاست توسعه داده شده و هدف از ساخت آن، ساختن یک بدنۀ کاملاً تازه بود. بنابراین این ربات با همۀ رباتهایی که ما تا کنون در مؤسسۀ IIT ساختهایم تفاوت دارد. جدا از آنکه ما از رویۀ پیشین خود برای طراحی بدنۀ انعطاف پذیر استفاده کرده و مفاصل انعطاف پذیری برای آن در نظر گرفتهایم، اما سختافزار آن ۱۰۰ درصد جدید است. یکی از ویژگیهای بارز آن استفاده از موتور درایوهای سفارشی توان بالاست که میتوانند چندین کیلووات توان را به یک مفصل منتقل کنند. ما طراحی بدنه را برای کاهش اینرسی و جرم آن بهینه کردهایم و بازده دینامیکی ربات را افزایش دادهایم. یک سامانۀ حسگر غنی وضعیت ربات را از نظر میزان بار (حس کردن گشتاور مفاصل)، درجه حرارت و خستگی محرکها و بخشهای الکترونیکی برای ما مشخص میکند.
از نظر کنترلی، درایوهای WALK-MAN قابلیت کنترل در وضعیتهای مختلفی شامل موقعیت، گشتاور و امپدانس را با حداکثر نرخ ۵ کیلوهرتز دارند.

– ربات WALK-MAN را در مقایسه با ATLAS چگونه ارزیابی میکنید؟
این دو در سامانۀ تحریک با یکدیگر تفاوت دارند. WALK-MAN با موتورهای الکتریکی کار میکند در حالی که ATLAS از یک سامانۀ هیدرولیکی استفاده میکند. اما از نظر اندازه خیلی شبیه به هم هستند (ارتفاع ۱٫۸۵m و فاصلۀ میان دو کتف ۰٫۸ متر). WALK-MAN سبکتر (با کوله پشتی ۱۲۰ کیلوگرم) از ATLAS (حدود ۱۸۰ کیلوگرم) است. از نظر تواناییها باید گفت که بازدهی مفاصل WALK-MAN بسیار نزدیک به مفاصل ATLAS است. مفاصل پا میتوانند گشتاور حداکثر ۳۲۰Nm و سرعت ۱۱ تا ۱۲ رادیان بر ثانیه را در گشتاور ۲۵۰Nm تولید کنند. بازوهای WALK-MAN محدودۀ وسیعتری از گشتاور را (حداکثر ۱۴۰Nm) میتوانند در کتفها تولید کنند. ما فکر میکنیم که نسبت به ATLAS بازدهی بیشتری داریم و میتوانیم مدت زمان بیشتری را بدون نیاز به شارژ دوباره سپری کنیم.
– دربارۀ نرمافزار ربات چه میتوانید بگویید؟ ربات چه کارهایی را میتواند به شکل خودکار انجام دهد؟
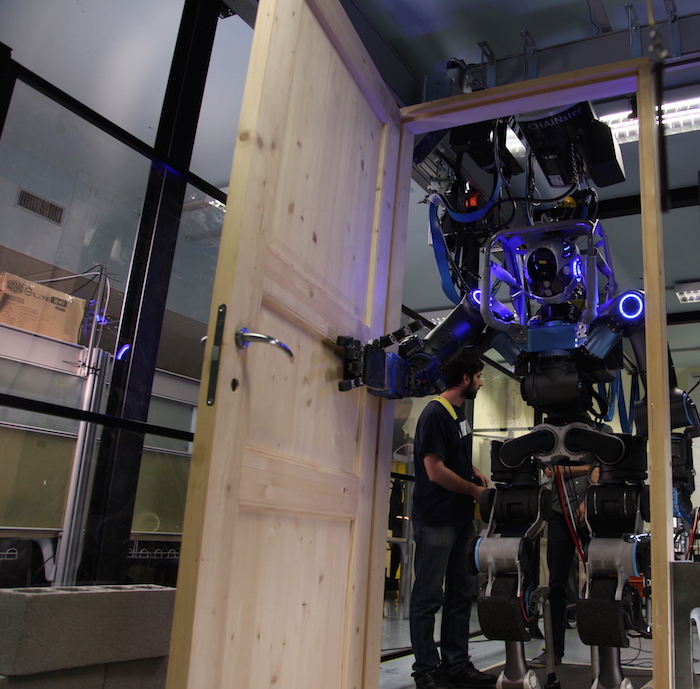
ساختار نرمافزار بر پایۀ ROS و YARP است. بسیاری از بخشهای نرمافزاری ربات از ماژولهای ROS استفاده میکنند اما واسط نرمافزاری ربات بر پایۀ واسط میانی YARP است که در مؤسسۀ IIT توسعه داده شده است. ربات از یک اپراتور که در یک ایستگاه مستقر میشود فرمان میگیرد و میتواند برخی از کارها از جمله برقراری تعادل، راه رفتن و اندازهگیری فاصله را با استفاده از سامانۀ تحلیل خود انجام دهد. بیشتر کارهایی که ربات انجام میدهد توسط فرمانهایی که کاربر به او میدهد کنترل میشود. کاربر مسئول حرکات و تصمیم گیریهای مورد نیاز ربات است. ما در آزمایشگاه یک محیط تمرینی برای ربات ایجاد کردهایم تا حرکتهای رقابت رباتیکی DARPA را تمرین کنیم: یک دیوار برای سوراخ کردن، یک در برای باز کردن و عبور از آن، یک شیر آب و یک راهرو طولانی برای راه رفتن. علاوه بر این برای تمرین رانندگی هم از خودرو Polaris در پارکینگ مؤسسه استفاده کردهایم.
– تا کنون بزرگترین چالش شما چه بوده است؟
بزرگترین چالش برای ما زمان بوده است. پروژۀ WALK-MAN پانزده ماه پس از فراخوان مسابقۀ DARPA آغاز شد؛ تقریباً هنگام آزمودن رباتهای شرکت کننده در مسابقه. ما باید یک ساختار کاملاً جدید برای ربات میساختیم و همزمان به کمک شبیه سازی بر روی نرمافزار نیز کار میکردیم. WALK-MAN تنها در طول ده ماه (از مارس ۲۰۱۴ تا ژانویه ۲۰۱۵) طراحی و ساخته شد که در نوع خود یک رکورد محسوب میشود. پس از آن باید شروع به عیب یابی سختافزار جدید میکردیم و آن را با نرمافزار تطبیق داده و دوباره عیب یابی میکردیم تا به تدریج بتوانیم قابلیت اطمینان سامانه را افزایش داده و آزمایش وظایف ربات را انجام دهیم. ما تنها سه ماه برای انجام همۀ این کارها وقت داشتیم و قطعاً انجام دادن این کارها با وجود این همه اجزای جدید و سفارشی که استفاده کردیم چالش بسیار بزرگی بود.

– گروه شما از چند نفر تشکیل شده است؟
گروه ما متشکل از ۱۹ نفر است که بیشتر آنها دانشجویان دکترا، کارشناسی ارشد و پژوهشگران پسادکترا هستند. توسعۀ نرمافزار ربات توسط ۱۲ نفر انجام شد که بر روی بخشهای مختلف آن شامل واسطهای سخت افزار، ساختار نرمافزاری، ماژولهای بالادستی تولید حرکت و ادراک سامانه و نرمافزار ایستگاه کاربری کار میکردند. گروه سختافزاری شامل ۷ نفر است که ۵ نفر از آنها طراحی مکانیکی سامانه را انجام میدهند و دو نفر نیز بر روی بخشهای الکترونیکی ربات کار میکنند. بیشتر اعضای ما از مؤسسۀ IIT هستند و ۱۳ نفر از آنها به صورت تمام وقت بر روی این پروژه کار میکنند. اما ما همکارانی نیز از Centro E. Piaggio و از گروه پروفسور Antonio Bicchi از دانشگاه پیزا داریم.
برای آشنایی بیشتر با پروژۀ WALK-MAN اینجا را ببینید.
منبع: IEEE Spectrum


