تقلید زیستی همیشه بهترین پاسخ برای کنترل بهینه رباتیک پوشیدنی نیست
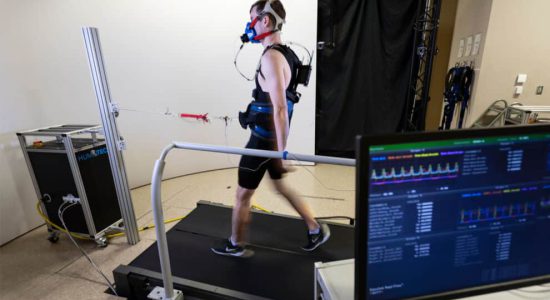
در یک پژوهش جدید تغییرات در زمانبندی بهینهی اعمال نیرو حین راه رفتن روی تردمیل با هدف کاهش هزینه متابولیک راه رفتن بررسی شد. نتایج این مطالعه نشان میدهد «کمک الهامگرفته از طبیعت» یا اعمال نیروی کمکی در مرحله گام برداشتن، همیشه برای بهبود راه رفتن انسان بهینه نیست. این مطالعه توسط دکتر Phillippe Malcolm در دانشگاه نبراسکا اوماها رهبری شد. آنها دریافتند که کمک کردن در مرحله ترمز میزان متابولیک شرکت…