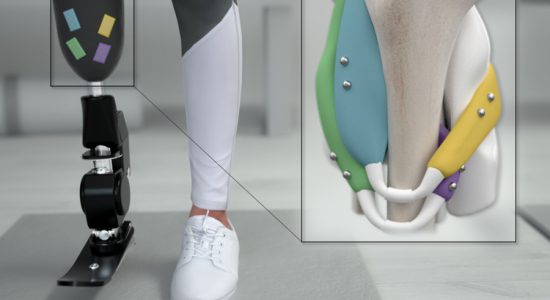
روشی کاربرپسند برای تنظیم اسکلت بیرونی
اسکلتهای بیرونی رباتیک از حرکات کاربر پشتیبانی میکنند و به کاربران آسیبدیده کمک میکنند تا تحرک خود را دوباره به دست آورند. برای همکاری بهینه میان انسان و ماشین، تنظیمات پیچیدهای لازم است تا اسکلت بیرونی بتواند بهترین سطح پشتیبانی را ارائه دهد. پژوهشگران دانشگاه میشیگان و دانشگاه اشتوتگارت، روشی توسعه دادهاند که با استفاده از آن خود کاربران میتوانند پارامترهای اسکلت بیرونی مچ پا را در کمتر از دو دقیقه تنظیم…