شبکههای عصبی مصنوعی که با الهام از اتصالات نورونهای عصبی ساخته شدهاند به جانداران امکان هدایت دستهای مصنوعی و انگشتان آن را با دقت بالا میدهند. دانشمندان دانشگاه میشیگان این امر را به خوبی نشان دادهاند که یک شبکه عصبی مصنوعی ساده برای کنترل پروتزهای دست بهترین گزینه است. این یافته میتواند سبب به هدایت هرچه طبیعیتر پروتزهای پیشرفته شود. امری که به سود افرادی است که با نقص عضو دست و پنجه نرم میکنند. در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به جزئیات بیشتری در این مورد اشاره خواهیم کرد.
گروهی از مهندسان و پزشکان دانشگاه میشیگان دریافتند که یک شبکه عصبی feed-forward برای هدایت انگشتان پروتز، بیشینه سرعت حرکت انگشتان را نسبت به الگوریتمهای متداول تا ۴۵ درصد بهبود میبخشد. این یافته برخلاف انتطار بسیاری مبنی بر این است که شبکههای عصبی پیچیده، مانند شبکههای استفاده شده در سایر شاخههای یادگیری ماشین، برای دستیابی به بازده بالا در یک پروتز عصبی لازم است.
به گفته Cindy Chestek دانشیار مهندسی پزشکی و یکی از نویسندگان مقاله این پژوهش در مجله Nature Communications این شبکه عصبی feed-forward نمایشی از یک ساختار قدیمیتر و سادهتر است که در آن اطلاعات تنها در یک جهت حرکت میکنند. بنابراین مشاهده اینکه این شبکه ساده چطور شبکههای پیچیده را مغلوب میکند شگفت انگیز است. وی همچنین باور دارد که سادگی این شبکه به کاربر اجازه میدهد پروتز خود را بدون واسطه و به شکل مستقیم هدایت کند.
ثبت سیگنال های عصبی برای حرکت دادن پروتز
Matthew Willsey یک پزشک و فعال در دانشگاه سلامت میشیگان، پزشکی میشیگان در بخش جراحی عصبی است. او و گروهش با آگاهی از اهمیت حرکات ظریف بدن برای کاربران، با انگیزه بالا از آخرین فناوریهای حوزه یادگیری ماشین استفاده میکنند. آنان با این فناوری فعالیتهای مغز را برای کنترل به حرکت درآوردن انگشتان به کار میگیرند.
پروتزهای پیشرفته عصبی و رابطهای مغز و ماشین برای بازیابی کنترل روی اعضای بدن حتی در مواردی مانند آسیب نخاعی و سکته نیز به کارگرفته میشوند. اما بازسازی راههای ارتباطی عصبی از دست رفته میان مغز و اعضای بدن همچنان مسالهای دشوار باقی مانده است.
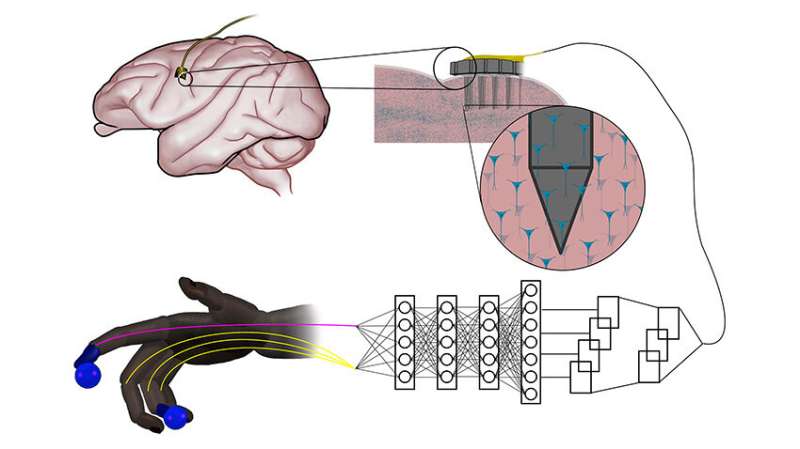
در آسیب نخاعی یک شبکه عصبی مصنوعی میتواند اتصال از بین رفته میان مغز و نخاع را با استفاده از الکترودها جبران کند. الکترودها پالسهای عصبی مغز را دریافت میکنند. سپس هوش مصنوعی این پالسها را تفسیر کرده و با استفاده از آن دست رباتیک را به حرکت درمیآورد.
چرا یک شبکه عصبی ساده کارایی بهتری برای کنترل پروتز دارد؟
فرض معمول است است که قدرت محاسباتی مدل شبکه عصبی feed-forward کمتر از شبکه عصبی پیشچیده است. در الگوریتمهای پیشرفته نقاط شبکه دینامیک خاص خود را دارند که گذر اطلاعات از آنها به یک جهت محدود نیست. در یک شبکه پیچیده هر نقطه از شبکه میتواند یک چرخه برای انتقال اطلاعات درست کند. به همین دلیل هر نقطه شبکه نوعی توالی خاص برای ایجاد حافظه و پاسخویی دارد. در صورتیکه دادههای عصبی از پیش ثبت شده برای تغذیه شبکه عصبی وجود داشته باشد، یک شبکه عصبی پیچیده از این دست کارایی بالایی دارد. به همین دلیل این باور ایجاد میشود که شبکه عصبی حین آزمایشی که اطلاعات آن در لحظه تولید میشود نیز زمانی کارایی بالایی دارد که پیچیده باشد.
این درحالی است که مشاهدات Chestek حاکی از این است که پیچیدگی شبکه و وجود بازگشت در آن با قصد کاربر برای حرکت دادن پروتز مبارزه میکند. در بدن انسان واسط میان موتور کورتکس و حرکات دست تنها نورونها و سیناپسها هستند. بنابراین حجم بالایی از پردازش در اینجا نیاز نیست. به همین دلیل یک شبکه عصبی feed forward میتواند یک سیستم عصبی را بهتر مدل کند.
آینده طرح میشیگان برای پروتزها
این گروه امیدواراست که یافتههایش در پیشبرد پژوهشهای آتی و افزایش سرعت و دقت پروتزهای عصبی موثر باشد. Willsey در این مورد بیان کرد: « هنگام توسعه این الگوریتم واقعا سعی کردیم اصل مشهور انشتین را که هر چیزی باید تا حد ممکن ساده شود اما نه بیشتر را به کار بگیریم. این الگوریتم باید پیچیدگی کافی برای درک رابطه غیر خطی سیگنالهای مغز و حرکات مورد انتظار کاربر را داشه باشد. در عین حال این الگوریتم میتواند بخشی از یک ایمپلنت قابل کاشت یک رابط مغز و ماشین برای بازیابی حرکت کاربران معلول باشد. پیچیدگی غیرضروری میتواند این سامانه را به روشهای نامطلوب مغشوش نماید و عمر باتری را کاهش دهد.
شرکتهای اسکلت بیرونی که باید بیشتر در مورد آنها بدانید
بازیابی عملکرد بازو در افراد مبتلا به اسکلروز جانبی آمیوتروفیک با یک پوشیدنی رباتیک نرم
منبع: medicalexpress
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»

