آیا تا به حال یک بادکنک را به موهای سرتان مالیدهاید تا به دیوار بچسبد؟ این چسبندگی الکترواستاتیک که electroadhesion نام دارد ممکن است رباتیک را برای همیشه متحول کند.
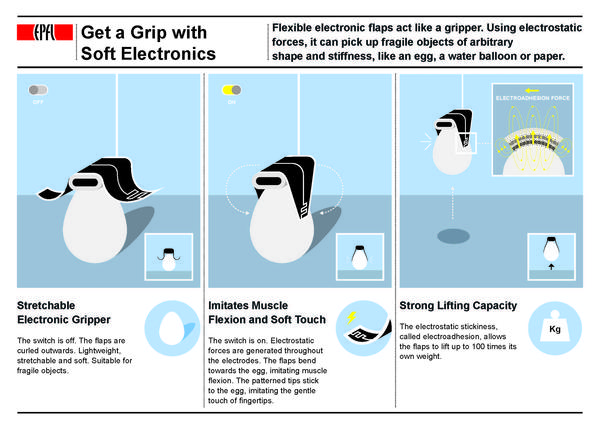
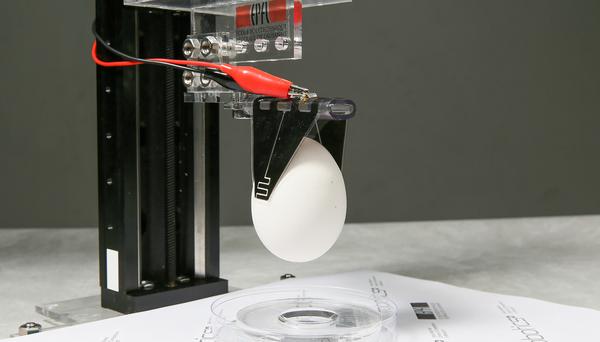
دانشمندان EPFL یک پنجۀ رباتیک منعطف تازه را اختراع کردهاند که چسبندگی الکترواستاتیک را بکار میگیرد و از دو زبانۀ الکترود منعطف تشکیل شده است که مانند بکارگیری انگشتان شست و سبابه برای بلند کردن اشیاء عمل میکند. این نوآوری میتواند اشیاء شکننده با هر شکل و سفتی مانند تخممرغ، بادکنک پر آب یا کاغذ را بلند کند.
این پنجۀ سبک وزن ممکن است در آیندۀ نزدیک غذاها را در صنایع غذایی جابجا کند، زبالههای فضایی را جمعآوری کند یا در دستهای مصنوعی بکار گرفته شود. این پژوهش توسط شرکت NCCR Robotics تأمین مالی شده و مقالۀ مرتبط با آن در مجلۀ Advanced Materials منتشر شده است.
Jun Shintake دانشجوی دکتری در EPFL و نخستین مؤلف مقاله میگوید: «این نخستین بار است که چسبندگی الکترواستاتیک و رباتیک منعطف برای بلند کردن اشیاء با یکدیگر ادغام میشوند.»
در این انگشتان رباتیک هنگامی که ولتاژ الکتریکی برقرار میشود، الکترودها به تقلید از عملکرد ماهیچهها، برای بلند کردن جسم به سمت آن خم میشوند. نوک الکترودها مانند نوک انگشتان عمل میکند که به آرامی با شکل جسم تطبیق پیدا میکنند و مانند بادکنکی که به دیوار میچسبد با نیروهای الکترواستاتیکی به جسم میچسبند. این الکترودها میتوانند تا ۸۰ برابر وزن خود را حمل کنند و هیچ دانش قبلی در مورد شکل جسم لازم نیست.
 در مقایسه، دیگر پنجههای منعطف و انگشتان رباتیک یا به صورت بادی کنترل میشوند و یا بدون داشتن دانش پیشین در مورد شکل، در بلند کردن اشیاء شکننده شکست میخورند و همچنین تنها قادرند اشیاء مسطح یا غیر مسطح را بلند کنند. Dario Floreano استاد راهنمای دکتری در EPFL می گوید:
در مقایسه، دیگر پنجههای منعطف و انگشتان رباتیک یا به صورت بادی کنترل میشوند و یا بدون داشتن دانش پیشین در مورد شکل، در بلند کردن اشیاء شکننده شکست میخورند و همچنین تنها قادرند اشیاء مسطح یا غیر مسطح را بلند کنند. Dario Floreano استاد راهنمای دکتری در EPFL می گوید:
«نوآوری پنجۀ منعطف ما در ترکیب دو فناوری ماهیچههای مصنوعی و چسبندگی الکترواستاتیک است. پیکربندی منحصربفرد ما از الکترودها و غشاهای سیلیکونی چیزی است که به ما اجازه میدهد خم شدن زبانهها و چسبندگی الکترواستاتیک را کنترل کنیم.»
زبانههای الکترود از پنج لایه تشکیل شده است: یک لایۀ از پیش کشیده شدۀ الاستومر که بین دو لایه از الکترود قرار گرفته است به علاوۀ دو لایۀ بیرونی از سیلیکون با ضخامتهای متفاوت. هنگامی که ولتاژ قطع میشود اختلاف ضخامت لایههای بیرونی باعث میشود زبانهها به سمت بیرون خم شوند. هنگامی که ولتاژ وصل میشود جاذبۀ بین دو لایۀ الکترودها غشاها را صاف میکند. این صاف شدن غشا از حالت خمیده، خمشدن ماهیچهها را تقلید میکند.
در نوک زبانههای این انگشتان رباتیک الکترودهای هر لایه برای چسبندگی الکترواستاتیک بهینه طراحی شدهاند. این الکترودها که مانند دو شانۀ فرو رفته در یکدیگر به نظر میرسند، میدان الکترواستاتیکی را به وجود میآورند که مسبب چسبندگی الکترواستاتیک است.
 منبع: EPFL
منبع: EPFL


