تماشا کنید: داشتن دست سوم با انگشتان رباتیک کنترل شونده با ذهن
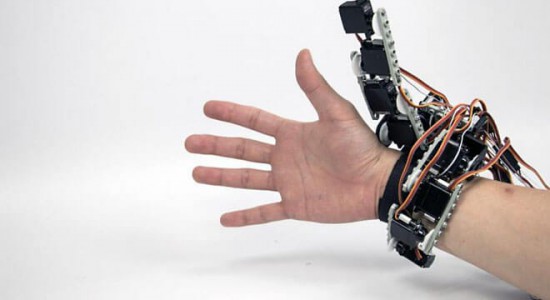
پژوهشگران موسسۀ فناوری ماساچوست یک دست رباتیک کنترل شونده با ذهن پیشرفته را توسعه دادهاند که میتواند دور مچ یا هر قسمت دیگری از بازوی کاربر بسته شود. این دست شامل دو انگشت منعطف با قابلیت حرکت ۱۸۰ درجه است. همچنین کاربر قادر است برای انجام کارهای خاص آن را با حرکات اشارۀ دست کنترل کند. ساختار کلی این دست از ۱۱ موتور استفاده میکند تا به عنوان یک سامانۀ چندمنظوره با…