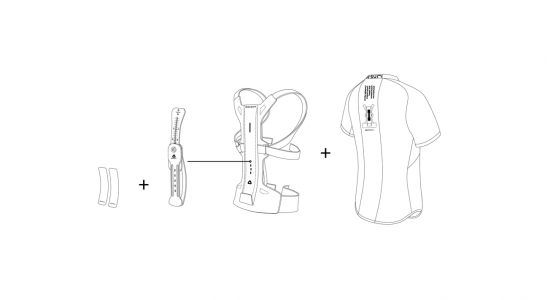
مسیری ساده و ارزان برای ساخت اسکلت های بیرونی با قابلیت حفظ تعادل
یک ربات یک پا که میتواند بایستد، بپرد و تعادل خود را روی سطوح شیبدار یا ناپایدار حفظ کند، مسیری ارزان برای ساخت رباتهای دوپا و اسکلتهای بیرونی متعادل است. پژوهشگران مؤسسه فناوری تویوتا (TTI) در ناگویای ژاپن، ربات یک پای خود با نام TTI Hopper را با استفاده از موتورها و چرخ دندههای ساده و هزینه کمتر از ۱۰۰۰ دلار ساختند. آنها سپس الگوریتمی طراحی کردند که تواناییهای محدود این اجزا…