ترکیب حس لامسه و بینایی برای هدایت ربات ها توسط پژوهشگران CSAIL در MIT
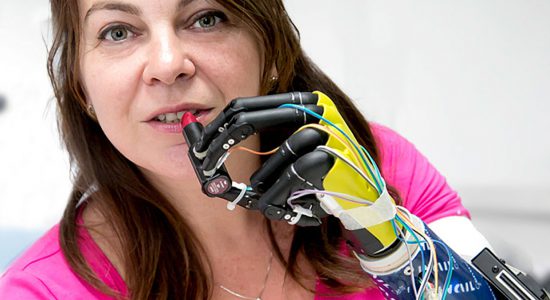
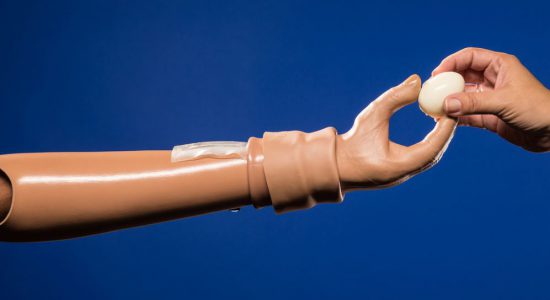
انسان با تلفیق اطلاعات بینایی و اطلاعاتی که از لمس اشیا بدست میآید قادر به برهمکنش با دنیای اطراف هست. در صورت از دست دادن یکی از این دو حس، دیگری را میتوان برای درک دنیای اطراف پرورش داد. رباتها قادر به استفادهی بهینه و تلفیقی از اطلاعات تصویری و حسی نیستند. برای حل این مشکل پژوهشگران MIT یک هوش مصنوعی ساختند که اطلاعات تصویری و لامسه از روی یکدیگر استنتاج میکند….