زمانی رویایی ریاست شرکت INJENO Association، Luc Masson، راه رفتن دخترش بود. دختر وی، Ine، به علت چندین مشکل عصبی که توانایی حرکتی وی را مختل کرده بود، توانایی راه رفتن نداشت. یکی از شرایط Ine صرع بود. Ine از صندلی چرخدار دارای پشتی سر استفاده میکرد. او برای حرکت به کمک دیگران نیاز داشت. در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به دستگاهی میپردازیم که توسط Motopn Project نخست برای Ine طراحی شد. این اسکلت بیرونی پیشتر تحت عنوان اسکلت Junia Hei معرفی شده بود.
Luc به گروه رباتیک و مکاترونیک تحت سرپرستی Laurent Peyrodie مراجعه کرد. او به دنبال یک اسکلت بیرونی پایین تنه برای کودکان بود. ابزاری که کلینکها از آن برای توانبخشی استفاده کنند. این وسیله به کودکانی مانند دختر وی امکان راه رفتن میداد. پیشتر نیز تلاشهای برای ساخت اسکلت بیرونی کودکان انجام شده بود. اما تعداد آنان کم است. برای مشاهده فهرستی از پیشینه اسکلت بیرونی Junia و سایر اسکلتهای بیرونی کودکان به اینجا مراجعه نمایید.
طرح JUNIS HEI Motion از مهندسین پزشکی، مهندسین مکانیک و تکنیسینهای سلامت تشکیل شده است. این گروه ارتز پزشکی برای کودکان دچار آسیبهای شدید عصبی تولید میکند. آنان با بیش از دوازده ارگان تجاری، غیرتجاری و آموزشی همکاری میکنند. یک برنامه تامین بودجه در اروپا بودجه پژوهش آنان را به ۷.۲ میلیون دلار رسانید.
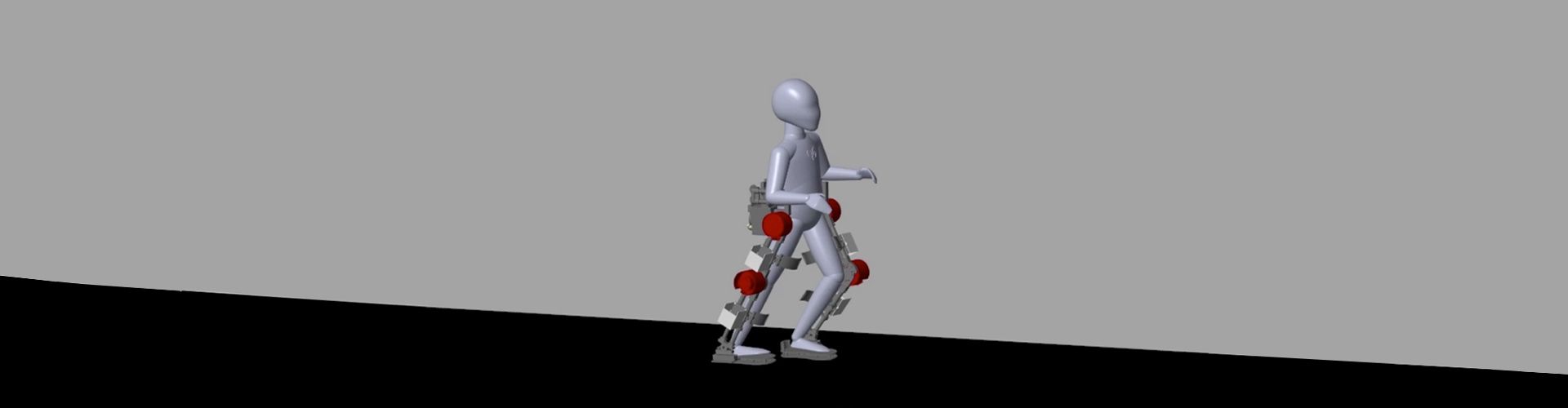
استفاده از ابزار MATLAB برای شبیه سازی اسکلت بیرونی
گروه Peyrodie به همراه یک دانشجوی پسادکتری وی از چاپگر سه بعدی برای ساخت قطعات اسکلت بیرونی کودکان استفاده کردند. آنان تولید خود را با MATLAB و ابزار Simulink و Simscape Multibody سرعت بخشیدند. این ابزارها طراحی و دینامیک موتور را مدلسازی میکرد. استفاده از این ابزارها زمان طراحی گروه را به نصف رسانید.
به تازگی یکی از همکاران کوچک جسه در این در گروه آخرین نمونه اسکلت بیرونی گروه را آزمایش کرده است. گروه امیدوار است که در ماههای آینده مجوز آزمایش اسکلت بیرونی برای کودکان را کسب کند.
نخستین گام JUNIA HEI
یک پژوهش در سوئد بیان کرده است که ۳۰ درصد کودکان دارای فلج مغزی تا سن پنج سالگی توانایی راه رفتن را از دست میدهند. پژوهشی دیگر بیان میکند که ۱۶ درصد این کودکان از فناوریهای کمکی برای راه رفتن استفاده میکنند. گروه نتیجه گرفت که فناوری آنان برای ۶۵۰۰ کودک مفید است. و این عدد تنها مربوط به کودکان دارای فلج مغزی است. بیماریهای دیگری نیز هستند که متاسفانه کودکان را از حرکت باز میدارند.
بنابراین گروه نیاز داشت با سرعت بالا فناوری خود را طراحی و آماده سازد. یکی از محدودیتهای گروه بودجه بود. Interreg 2 Seas پژوهش گروه را در سال ۲۰۱۹ پشتیبانی کرد. این پشتیبانی در زمان کرونا کمی تمدید شد. با این وجود گروه باید کار خود را سریع به پیش میبرد.
چالش های ساخت اسکلت بیرونی کودکان
هم اینک نیاز پزشکی برای اسکلت بیرونی وجود دارد. اما اسکلت بیرونی به عنوان یک فناوری بزرگسال جا افتاده است. مانند اسکلت بیرونی صنعتی که از آسیب پیشگیری میکند. ساخت یک اسکلت بیرونی ویژه کودکان و دریافت تائیدیه برای آن نیازمند پژوهشهای بالینی دقیق و اطمینان از ایمنی دستگاه است.
هدف گروه ساخت یک اسکلت بیرونی برای کودکانی است که از چندین بیماری و ناهنجاری عصبی رنج میبرند. این کودکان معمولا برای برقراری ارتباط و بیان نیازهای خود نیز مشکل دارند. بنابراین گروه باید دقت زیادی به کار میگرفت.
چالشی دیگر بدست آوردن تائیدیه اخلاقی در این مورد است. پس از آن سازمان سلامت اروپا با بررسیهای دقیق، سازندگان را پیش از اقدام برای تائیدیه اروپا (CE یا Conformite Europeenne) میسنجد.
مساله مهم دیگر قیمت تمام شده اسکلت بیرونی پایین تنه کودکان است. یک کودک در حال رشد نیازمند چندین سامانه است. این امر هزینه را افزایش میدهد. به همین Motion Project روشی خاص برای تطبیق اسکلت بیرونی با اندازه و وزن کاربر کوچک خود به کار گرفت. گروههایی که پیشتر اسکلت بیرونی را برای کودکان طراحی کرده بودند نیز چالشهایی مشابه را گزارش کردند. به طور مثال میتوان به اسکلت بیرونی ویژه کودکان SMA، اسکلت بیرونی ساخت Elena García Armada اشاره کرد.
اسکلت بیرونی JUNIA HEI Motion Project مناسب کودکان ۸ تا ۱۲ سال تا وزن ۵۰ کیلوگرم با طیفی از ناتوانیهای بدنی از جمله پاراپلژیا در پایین تنه است.

راه رفتن با کمک اسکلت بیرونی
راه رفتن دوباره به شکل طبیعی با یک دستگاه کمکی نیازمند دسترسی به یک سامانه پیچیده و به اندازه کافی محکم است. تنها در این صورت کودکان و سرپرستان آنان به سامانه اطمینان میکنند. کار با این دستگاه نباید سخت باشد. در این صورت متخصص توانبخشی نیز میتواند از آن به سادگی بهره برد.
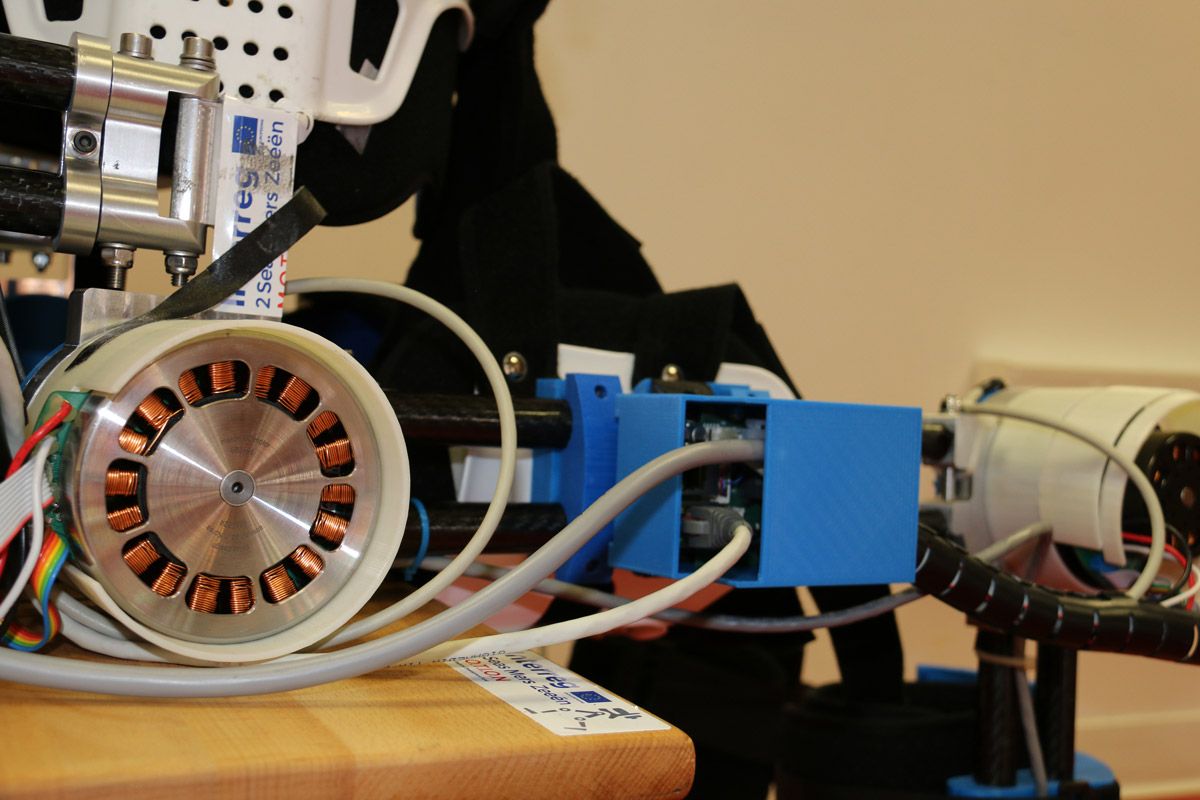
در ابتدا گروه تصمیم داشت برنامه نویسی دستگاه را با C++ انجام دهد. اما زمان محدود آنان را برآن داشت که از امکانات MATLAB، Simulink و Speedgoat استفاده کنند. وجود توابع آماده در این برنامهها سرعت کار را بسیار زیاد کرد. آنان با کمک Simscape Multibody یک مدل دینامیک از موتورهای اسکلت بیرونی خود در ابعاد مناسب یک کودک تهیه و شبیه سازی کردند. به این شکل پارامترهای مورد نیاز دستگاه و موتور را درک کردند و فهرست بلندبالای آنان از موتورها کوچک شد. آنان نهایتا یک موتور Maxon انتخاب کردند. درایورهای این شرکت به سادگی با پروتکلهای شبکههای صنعتی ارتباط برقرار میکرد و بدون مشکل با شبکه EtherCAT ادغام میشد.
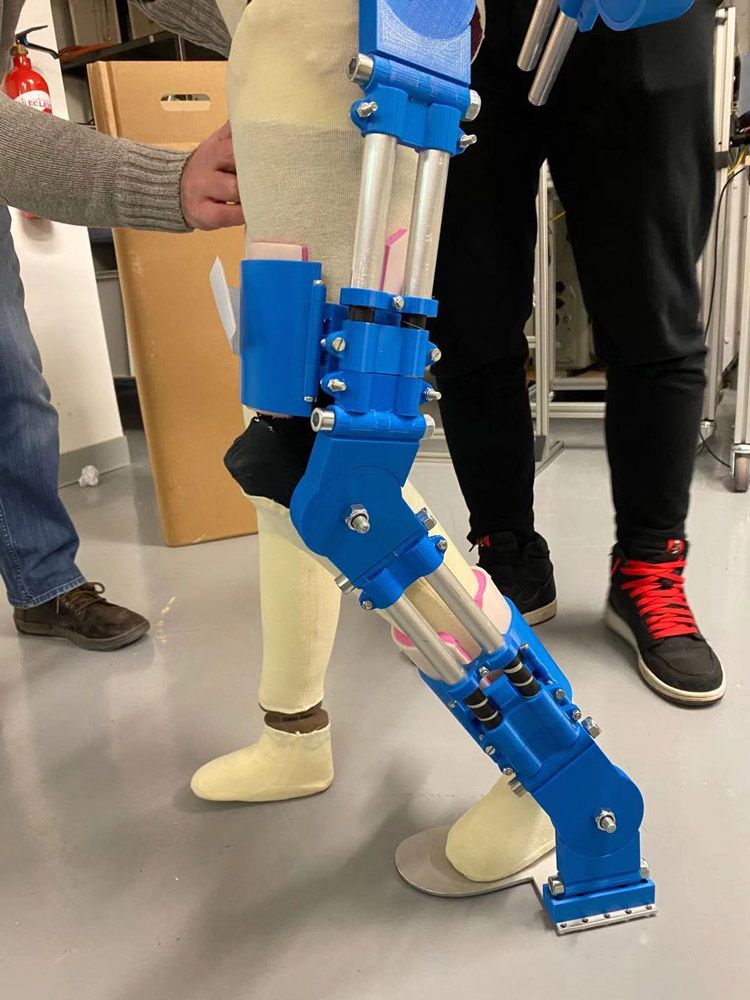
ساخت قطعات فلزی با پارامترهای عددی شبیه سازی رایانه امکان ایجاد تغییر حین کار را محدود میکرد. در عوض در ابتدا گروه قطعات پلاستیکی چاپ شده برای امتحان دستگاه استفاده کرد. پس از انتخاب موتور گروه به ساخت قطعات فلزی نیز توجه کرد.
تعیین حالت بدن با کمک حسگرهای دستگاه
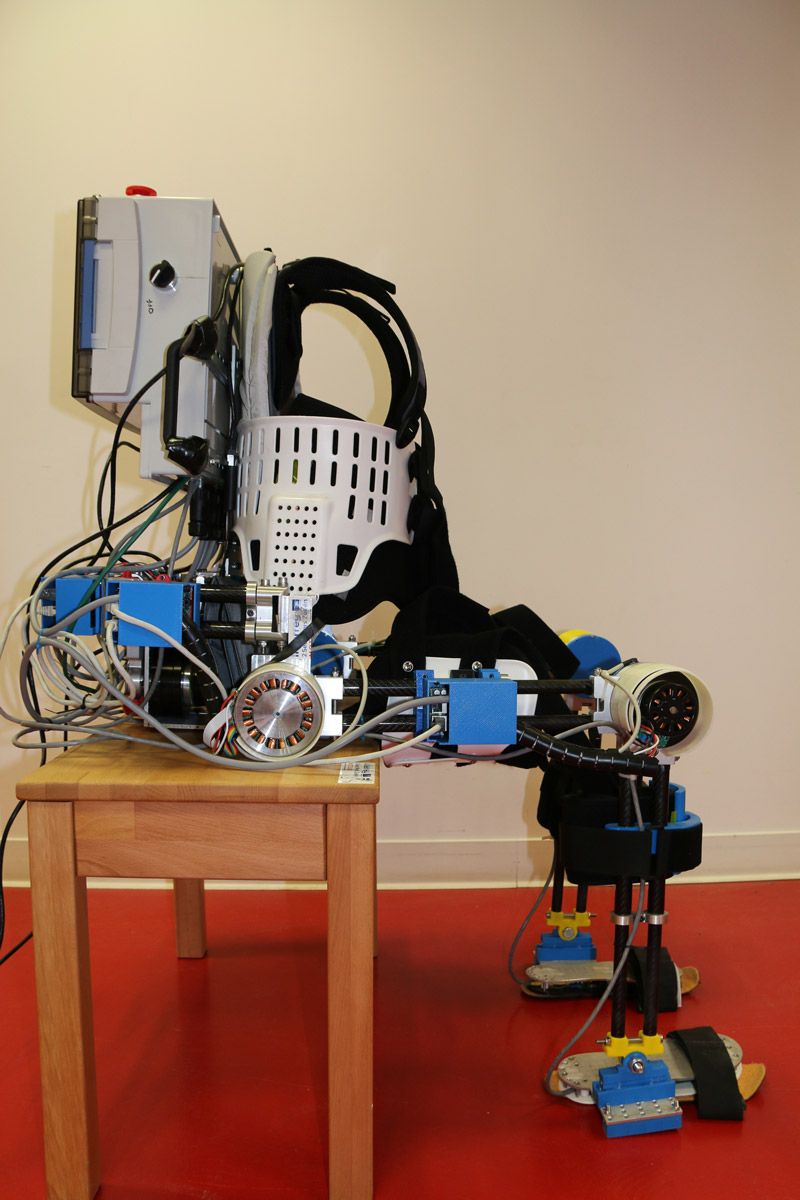
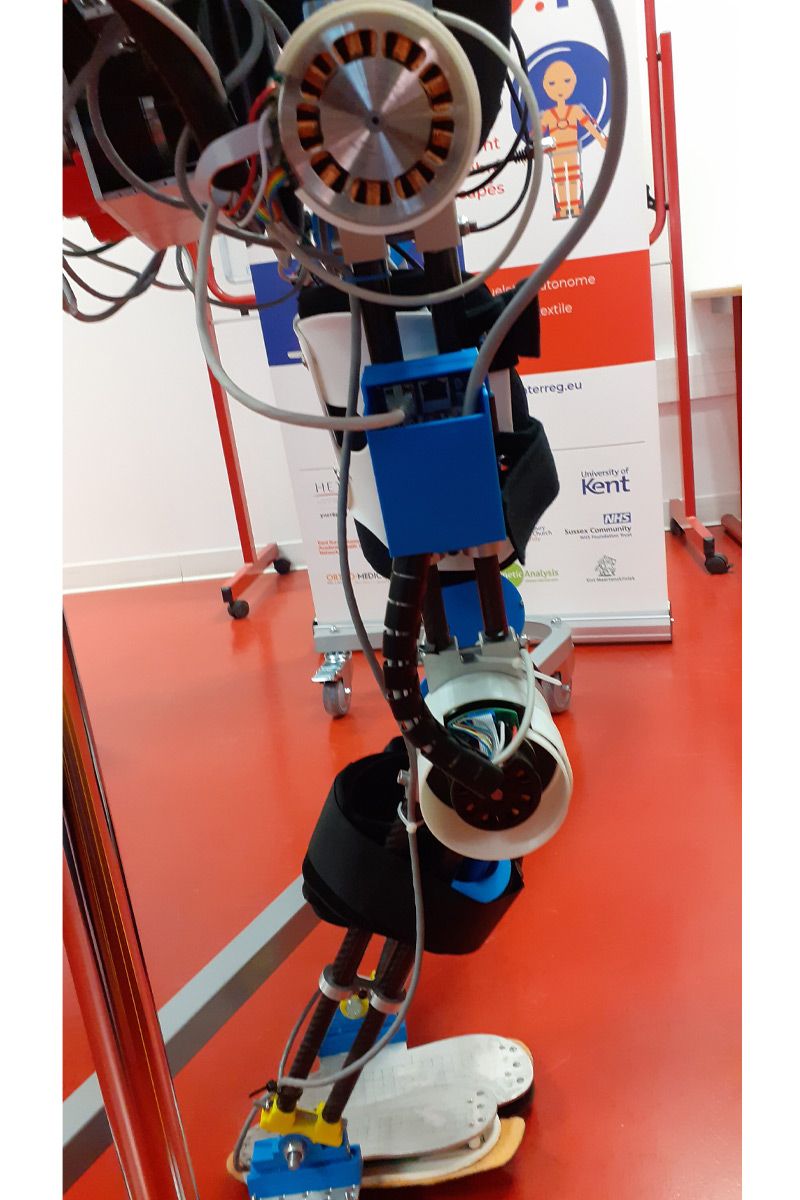
گروه حسگرهای فشار، یک واحد سنجش اینرسی (IMU) و باس استاندارد کن (CAN bus) را روی قاب وسیله در ناحیه پا نصب کرد. این ترکیب به گروه اجازه تعیین حالت بدن را میداد. در کل اسکلت بیرونی شش درجه آزادی فعال دارد که به لحاظ مکانیکی دامنه محدود دارند.
یک اسکلت بیرونی فعال بدون یک سامانه ارتباطی خوب که موتور و حسگرها را به یکدیگر مربوط سازد،کارایی ندارد. Simulink Real-Time راه حلی مناسب بود که هر طراحی هر مدل دلخواه و هر الگوریتم کنترلی مورد نظر را به نمونه اعمال میکند. این ابزار از پروتکلهای استاندارد صنعتی سرعت بالا بهره میبرد.
در ابتدای همه گیری کرونا کار به علت دسترسی محدود با دانشگاه کند شد. با این حال گروه طرح خود را از راه دور پیگیری کرد. آنان همواره در حال بهبود بخشیدن با ایجاد تغییرات کوچک روی نمونه خود بودند.
کاوش در مرزهای ناشناخته علوم و مهندسی در JUNIA HEI
اسکلت بیرونی واحدی داخلی برای اندازهگیری لختی، کدگذار (encoder) روی مفاصل برای هدایت زاویه و یک حسگر نیروسنج دارد. چهار حسگر در قسمت پا ناحیهای را مییابند که پا روی آن فشار میآورد. این امر برای حفظ تعادل کاربر لازم است.
الگوریتم توسعه یافته برای انتقال وزن پیش از گام برداشتن وزن را روی پای جلو میاندازد. سپس پای آزاد برداشته میشود و به صورت خودکار به جلو میرود. وجود حسگرها روی هر پا مهندسین را مطمئن میسازد که وزن منتقل شده است. در صورت موفقیت گام نخست، گام بعدی آغاز میشود. در آینده گروه قصد دارد قابلیت افزایش طول گام را نیز برای بهبود ایمنی و پایداری به این الگوریتم اضافه کند.
هرچند شبیه سازی با Matlab امکان آزمایش و اسکلت بیرونی را فراهم کرده است، هنوز به نظر تخصصی نیاز است. چراکه رویکردهای ملی در توانبخشی پیوسته در حال تغییر است. به طور مثال در فرانسه متخصصین توانبخشی روی تحریک عضلات تاکید دارند. اما در هلند تاکید روی تمرینات روزانه است. بسیاری کشورها نیز داده کافی برای راهنمایی گروه نداشتند.
فراتر از تحرک با JUNIA HEI Motion Project
فناوریهای جدید امیدی تازه نیز برای گروه به همراه داشته است. فناوری لباس هوشمند Centexbel برای سنجش دمای بدن، ضربان قلب و دامنه حرکات برای گروه بسیار لازم است. سایر گروهها در حال توسعه فناوریها پردازش سیگنال برای تشخیص میزان تشویش کاربر هستند. داشتن رابط کاربری گرافیکی برای نمایش دادهها بسیار کمک کننده است. این لباس هوشمند نسبت به الکترودهای سنتی مزاحمت کمتری برای کاربر دارد.
آزمون های لازم برای دریافت تائیدیه برای اسکلت بیرونی کودکان
گروه امیدوار است که این لباس هوشمند در جلسات توانبخشی کودکان استفاده شود. آنان با این اطلاعات میتوانند میزان تطبیق کودک با فناوری را درک کنند. اسکلت بیرونی آنان آزمونهای الکتریکی را پشت سر گذاشته است. مرحله بعد سنجش کارایی آن در توانبخشی است. این کار در یک مرکز توانبخشی هلند انجام میشود. دریافت تائیدیه پزشکی زمانبر است اما گامی مهم برای گروه است. چراکه کارایی اسکلت بیرونی و ایمنی آن را نشان میدهد. در صورتیکه همه چیز به خوبی پیش رود آنان در زمستان آزمایش دستگاه با مشارکت کودکان را آغاز میکنند.
گروه امیدوارند که اسکلت بیرونی آنان به دو نیت استفاده شود. نخست برای توانبخشی تا کودکان بتوانند به کمک آن دوباره راه روند یا راه رفتن را ادامه دهند. دوم نیتی است که بیشتر جنبه احساسی دارد. Ine توانست به کمک این وسیله احساس راه رفتن را تجربه کند. تجربهای که برای وی حس شعف داشت. به همین دلیل گروه هرگز درخواست Luc Masson را فراموش نخواهد کرد.
این بازوبند پارچه ای در واقع یک پد لمسی است
تکامل اسکلت بیرونی
MOTION اسکلت بیرونی کودکان فلج مغزی
منبع: Mathworks
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


