
دست رباتیک منعطف، آزمایشگاه طراحی زیستی Harvard ، سال ۲۰۱۴
اسکلتهای بیرونی منعطف شبیه به دستکش که متکی بر پوسته بادشوندهای هستند که برای ایجاد تحریک منبسط میشود، بسیار مورد توجه قرار گرفتهاند. اسکلت بیرونی دست منعطف بادشونده مزیتهای فوقالعادهای نسبت به انواع مرسوم دارند. زیرا اجزایی که تأمین نیروی حرکتی را بر عهده دارند در عین حال پشتیبانی ساختاری را نیز تأمین میکنند. اسکلت بیرونی بادشونده بصورت همزمان هم محرک و هم بدنه اصلی میباشد. مانند هر دستکش توانافزا دیگری، دستکشهای بادشونده میتوانند برای توانبخشی یا تقویت توان استفاده شوند. همچنین تعدادی از نمونههای اولیه قادر به تغییر شکل خود برای سازگاری بهتر با انگشتان و پنجۀ دست هستند. دستگاههای بادشونده تمام مزیتهای اسکلتهای بیرونی منعطف را نسبت به انواع سخت آنها، در بر دارند: مواد ارزانتر، سبکتر و راحتتر بودن. افزون بر این، نسبت به اسکلتهای بیرونی منعطف مرسوم که برای تحریک وابسته به نیروی کششی/فشاری هستند، یک گام جلوترند. دستگاههای بادشونده نیازمند نقطۀ اتکاء بر روی مچ یا ساعد و همچنین میلهها و کابلهای اتصال نمیباشند.
دست رباتیک منعطف
به نظر میرسد دستکش اسکلت بیرونی منعطف بادشوندۀ Harvard پیشرو این عرصه باشد. در فیلم بالا، نمونۀ اولیه این دستکش قابل مشاهده است که توسط فردی مبتلا به تحلیل عضلانی بکار گرفته شده است. این کار نیز به نوبه خود نادر است چرا که بیشتر اسکلتهای بیرونی توانبخشی برای نمایش قابلیتها، توسط افراد سالم بکار گرفته میشوند. دستکش بادشونده نسبت به رقبای دارای بدنۀ محکم راحتتر بوده و میتواند زمان بیشتری پوشیده شود. همچنین پوستۀ بادشونده قابلیت تنظیم بالایی دارد. در تولید انبوه احتمالی، دست کاربر اسکن خواهد شد، پوستۀ بادشونده تولید شده و پس از آن در اطراف یک لایه بیرونی الاستیک پیچیده میشود. کنترلکننده، تنظیمکنندۀ فشار و دمنده احتمالاً میتوانند درون یک کولهپشتی یا کیف کمری قرار گرفته و یا حتی روی یک پیشخوان نزدیک قرار گیرند. ویدئوی نسخۀ پیشین این وسیله را از اینجا ببینید.
دستکش رباتیک منعطف
(National University of Singapore, Evolution Innovation Laboratory (NUS EI LAB
این دستگاه تا حدودی سادهتر بوده که در محل انگشتان به طور یکنواخت خم میشود. گروه NUS EI LAB فیلمهای بیشتری بر روی کانال یوتیوب خود دارند که کارهای آنها با دستگاههای بادشونده را نشان میدهد.
اسکلت بیرونی دست
University of Texas Arlington
دستکش اسکلت بیرونی UT Arlington صرفا برای اهداف توانبخشی طراحی شده است. بعد از عمل جراحی یا سکته مغزی، بیماران میبایست به همراه متخصصین توانبخشی که آنها را در بازیابی عملکرد دست خود کمک میکنند ساعتها وقت صرف نمایند. دستکش اسلکت بیرونی منعطف و ارزان قیمت که به تدریج کمک مورد نیاز بیمار را کاهش دهد، به متخصص توانبخشی اجازه میدهد تا همزمان به چندین بیمار کمک نموده و یا حتی به صورت از راه دور این کار را انجام دهد.
ابزار رباتیک منعطف
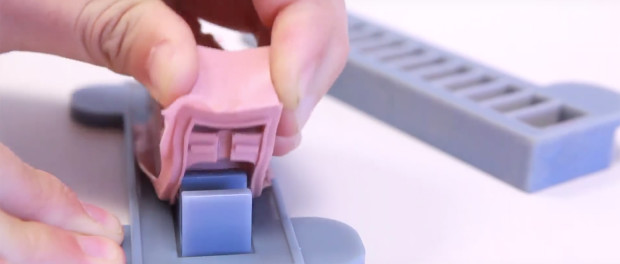
قالب و محرک بادشونده سیلیکونی، ابزار رباتیک منعطف
اگر رباتهای بادشونده واقعاً ارزان بوده و نیازمند قاب یا نقطه اتکاء نیستند، در این صورت این فناوری باید بیشتر در دسترس باشد. به نظر میرسد دست کم افراد وبگاه Soft Robotics Toolkit این گونه فکر میکنند. این وبگاه مرجعی دربارۀ شیوۀ ساخت ربات منعطف شخصی به همراه اطلاعاتی درباره مدلسازی، ساخت قالب، کنترلکنندهها و تأمینکنندههای توان است. همچنین پروژههای نمونۀ بسیاری در این وبگاه قرار داده شده است.
فراتر از اسکلتهای بیرونی دست منعطف
فناوری ابزار پوشیدنی بادشونده نباید تنها به اسکلتهای بیرونی دست محدود گردد. چندی پیش Otherlab Orthotics گزارش داد که نمونۀ اولیهای از یک بازوی کامل را ساخته و حتی اسکلت بیرونی بادشوندۀ تمام بدن را طراحی کرده است. با این حال اساساً لباس کامل بادشونده در تحمل وزن سنگین دچار مشکل خواهد شد. ترکیب اسکلت بیرونی بالاتنه با یک اسکلت بیرونی محکم که وزن کنترلکنندهها و دمندهها را تحمل کند، میتواند به ترکیبی معمول در رباتهای پوشیدنی تمام تنه تبدیل شود.
منبع: exoskeletonreport.com


