IHMC پیشینهای دیرین در پژوهشهای اسکلت بیرونی دارد. از فواید احتمالی اسکلت بیرونی میتوا به افزایش مقاومت، افزایش قدرت، کاهش بار روی مفاصل، تمرینهای مقاومتی، توانبخشی پس از آسیب و افزایش میزان تحرک در افراد دارای معلولیت اشاره کرد. این شرکت دو اسکلت بیرونی Quix و Eva را راه رفتن و استفاده حین کار ساخته است. در ادامه این مقاله از مجله فناوریهای توان افزا وپوشیدنی به معرفی IHMC و اسکلتهای بیرونی آن میپردازیم.

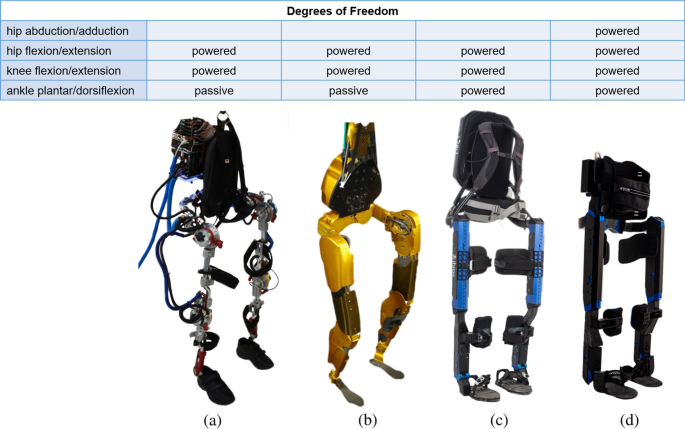
اسکلت های بیرونی IHMC با نام های Quix و Eva
دو طرح اسکلت بیرونی IHMC پیشینهای درخشان دارند. این دو اسکلت بیرونی Quix و Eva نام دارند. گروه رباتیک طراح این دو اسکلت بیرونی در سالهای ۲۰۲۱ و ۲۰۲۲ این دو اسکلت بیرونی مرتب به روز رسانی کرده است. به همین دلیل قابلیت این دو اسکلت بیرونی افزایش یافته است.
Quix چهارمین نمونه آزمایشی اسکلت بیرونی است که توسط IHMC طراحی شده است. این اسکلت بیرونی به لطف بهروزرسانیهای متعدد سخت افزاری جان تازهای گرفته است. Quix برای بهبود تحرک و استقلال افراد دارای معلولیت پایین تنه طراحی شده است. گروه سازنده اینک در حال بررسی پتانسیل و کارایی این وسیله در توانبخشی است. عضو جدید شرکت نیز اسکلت بیرونی دیگری با نام Eva است. Eva برای افزایش سطح سلامتی و بهبود کیفیت زندگی کارگرانی طراحی شده است که از وسایل ایمنی سنگین در حین کارهای خطرناک و کارهای بدنی استفاده میکنند.
بازطراحی Quix و توسعه Eva از نخستین طرحهای اساسی برای این گروه رباتیک است. به گفته دکتر Robert Griffin، دانشمند و پژوهشگر، دیدن پیشرفت این پروژه با ایدههای جدید اعضای جدید گروه، بسیار هیجان انگیز بوده است.
Quix از مسابقه Cybathlon در سال ۲۰۲۰ در قفسهای خاک میخورد. در مسابقه Cybathlon اسکلت بیرونی Quix یکی از فینالیستها بود. پیش از آن نیز این اسکلت بیرونی یکی از پنج اسکلت بیرونی برتر بخش چالش تحرک در CES2019 بود. Driffinو گروهش چند ماه را برای نشان دادن قابلیتهای این وسیله وقت صرف کردند. همزمان این گروه نرمافزار این اسکلت بیرونی را نیز بهبود بخشید.
برنامه IHMC برای بهبود Quix
به گفته Griffin در طی شش الی نه ماه آینده گروه بر روی بهبود گام زنی وسیله وقت صرف میکند. آنان با جمعآوری دادههای بیومکانیکی سعی خواهند کرد نیازهای فیزیولوژیکی لازم برای پوشیدن این اسکلت بیرونی را درک کنند. همچنین روشهای جدیدی برای بهبود سرعت و استواری وسیله حین گام زدن را آزمایش خواهند کرد.
بهبود گام زدن Quix بسیار مهم است. اما همزمان این گروه باید حوزههای پژوهشی این طرح را نیز موشکافی کنند. اسکلت بیرونی به افراد دارای معلولیت پایین تنه شانس راه رفتن میدهد. اما این وسیله بسیار سنگین است. درک نوع اثر فیزیولوژیکی اسکلت بیرونی روی کاربر به ساخت وسیلهای کمک خواهد کرد که پوشیدن آن در طولانی مدت قابل تحمل باشد.
دکتر Griffin در این مورد بیان کرد: «این آزمایشها به ما کمک میکند اسکلت بیرونی را طوری بهبود بخشیم که بیشتر در دسترس باشد.»
ادامه پژوهش برای بهبود گام زدن Quix همزمان با گسترش دامنه فعالیت با گره زدن این وسیله به برنامه بازده انسانی IHMC انجام شد. این طرح نوعی کار گروهی و مشترک در چند عرصه است. و این نوع پژوهش چندوجهی و توسعه هدف IHMC است.
جذب نیروی انسانی توسط IMHC
بخش مهمی از تلاشهای IHMC افزودن نیروی متخصص به گروه رباتیک بوده است. اعضای گروه دکتر Gwen Bryan و دکتر Greg Sawicki در این مرحله جذب شدند. ورود آنان تجربه مهمی در مورد بستر کاربری اسکلت بیرونی رباتیک و بازده آن را به شرکت اضافه کرد.

در این مورد نظر دکتر Griffin چنین است:« گروه ماه در ابتدا تنها در حوزه رباتیک تمرکز داشت. افزودن نیرویی مانند Gwen ،با تجربه در زمینه رباتیک و بیومکانیک، و Greg (با تجربه در هر دو حوزه اما تمرکز بر بیومکانیک) دانش ما را بسیار وسعت بخشید.»
Gwen Bryn و پژوهش های HiLO
Bryan پس از تکمیل طرح دکتری در دانشگاه Stanford به گروه پیوست. او در دوره دکتری یک شبیهساز لگن-زانو توسعه داد که از آن برای بهینهکردن نیروی پشتیبان اسکلت بیرونی استفاده میشد. وی با آزمایش به کمک شرکتکنندگان و بهینهسازی مکرر میزان پشتیبانی مناسب برای راه رفتن در سرعتهای مختلف و برای طیفی از وزن بار را پیدا کرد. او همچنین در مورد حساسیت افراد به میزان بهینه سازی اسکلت بیرونی مطالعه کرده است.
به گفته Bryn:« اسکلت بیرونی پلی فوقالعاده میان بخشهای مختلف رباتیک، انعطافپذیری، سلامت و کارایی انسان است.»
نظر دکتر Greg Sawicki در مورد گروه Quix و Bryn نظر خاص خود را دارد. مهمترین بهینهسازی برای اسکلت بیرونی Quix با دخالت انسان انجام میشود. در این زمینه Gwen Bryn سردمدار این روش برای دستیابی به بهترین استراتژی پشتیبانی از پا است. هدف این است که کاربر بیشترین مسافت ممکن پیش از خسته شدن را طی کند. سربازان یا کارگران یا نیروی پشتیبانی را میتوان هدف این پژوهش دانست. در حال حاضر گروه برای تطبیق تجربیات وی و تمرکز روی یافتن بهترین تنظیمات گام زنی Quix برای حفظ تعادل کاربر حین راه رفتن با سرعت مورد نظر کاربر است. این تنظیمات نباید فشار مضاعفی به بدن وارد کند. همچنین گروه به طور خاص از بازخورد کاربران در مورد ترجیحات وسلایقشان استفاده میکند تا حرکات اسکلت بیرونی را تنظیم کند.

Greg Sawicki و پوشیدنی های حرکتی در Georgia Tech
Greg Sawicki در سال ۲۰۲۲ در حالی به IHMC پیوست که موقعیت خود در Human Physiology of Wearable Robotics در موسسه فناوری Georgia را حفظ کرده بود. Greg Sawicki با گروه رباتیک، اسکلت بیرونی و وابستگی متقابل انسان -ربات همکاری میکند. در این میان Quix تنها طرحی نیست که وی روی آن متمرکز است.
آزمایشگاه Sawicki در Georgia Tech بر تطبیق مکانیزمهای زیستی تعیین کننده توان عضلات پایین تنه متمرکز است. آنان در پی ساخت پوشیدنیهای رباتیکی هستند که به انسان برای راه رفتن کمک کند. به گفته Sawicki این گروه برای آغاز آزمایشهای Quix در داخل آزمایشگاه آماده میشود. هدف اجرای کنترل بهینه و مقایسه آن با حداقلهای گام زنی اسکلت بیرونی است.
به گفته Sawicki در صورت موفقیت این طرح کاربران خواهند توانست با صرف تلاش کمتر، با سرعت بیشتری راه روند.
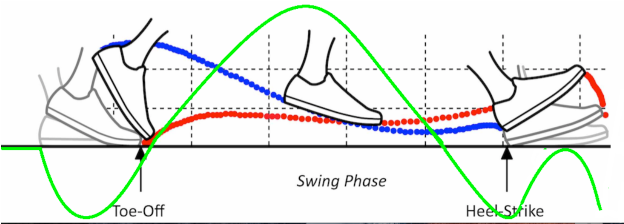
به گفته Bryn گروه Quix چند ماه برای آشکارسازی تماس اسکلت بیرونی با زمین و طبیعیتر کردن گامها وقت صرف کرده است. آشکارسازی تماس با استفاده از حسگرهایی انجام میشود که به محظ تماس پای کاربر با زمین سیگنالی تولید میکند. سپس الگوریتمهایی در سامانه هدایت Quix پاسخ راه رفتن دستگاه را بهینه سازی میکنند. این امر برای راه رفتن روی زمینهای ناهموار، پیمایش ۳۲ پله، در صورت تغییر آهنگ راه رفتن یا در صورت ناپایداری گامها مهم است.
به گفته وی اکنون نسخه آزمایش وسیله قابلیت تطبیق با هر ناهمواری روی زمین حین راه رفتن را داراست. این ویژگی تلاش لازم برای راه رفتن استوار را کاهش میدهد. راه رفتن باید با الگوهای مختلف گام زدن تطابق یابد تا احساسی مشابه راه رفتن انسان ایجاد کند.
تنظیم ارتفاع گام Foot clearance
برای این منظور ارتفاع پا هنگام بلند شدن از زمین تا قرار گرفتن مجدد روی زمین باید کاهش مییافت. این ارتفاع را Foot clearance مینامند. در نسخه پیشین ارتفاع ذکر شده بسیار زیاد بود بطوریکه گام برداشتن شبیه رژه میشد. اما الگوی جدید با کاهش این ارتفاع به ظاهر راه رفتن کمک میکند. به این شکل کاربر سریعتر و با مشکلات کمتر گام برمیدارد.
برای این منظر باید بازخورد بیومکانیکی بیشتری به کار گرفته میشود. به عبارتی نیاز بود که به اثری توجه شود که الگوی راه رفتن روی سرعت راه رفتن، فعالیت عضلات، مصرف انژی، تاب خوردن بالاتنه و غیره داشت. در این زمینه گروه تمایل دارند روی کاربرد اسکلت بیرونی Quix در توانبخشی نیز متمرکز شود.
کاربرد و فواید اسکلت های بیرونی مختلف برای سکته مغزی
جذب سرمایه ۱۵ میلیون یورو توسط GermanBionic
IHMC و اسکلت های بیرونی Quix و Eva(بخش دوم)
منبع: IHMCnews
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


