پژوهشگران شرکت Disney Research رباتی ساختهاند که حرکاتی با دقت و ظرافت انسانی دارد. این ربات حضور از راه دور (telepresence ) نوع جدیدی از سامانۀ انتقال قدرت هیدرواستاتیکی را بکار میگیرد که خطوط هیدرولیکی و خطوط هوا را برای تأمین درجۀ آزادی بیشتر و همچنین لمس ظریفتر و دقیقتر همراه با طراحی سادهتر ترکیب میکند.
از زمان توسعۀ نخستین بازوهای رباتیک، سامانۀهای حضور از راه دور از طراحیهای مکانیکی، هیدورلیکی و پنیوماتیکی بهره بردهاند. هر کدام از این طراحیها مزایا و معایبی دارد. برای نمونه کابلهایی که همراه با قرقره اتصالها را حرکت میدهند از سال ۱۹۴۵ در سامانۀهای کنترل از راه دور استفاده میشوند. این طرح روشی ساده و پایهای است که حتی به منبع توان خارجی نیز نیاز ندارد. با این حال محدودیتهای طراحی سختی این روش و همچنین فراهم نمودن بازخورد و کنترل ضعیف بخشی از معایب آن هستند.
از طرف دیگر سامانههای هیدرولیکی میتوانند توان لازم برای تبدیل انسان به یک ابرقهرمان را افزون بر بازخورد مناسب و کنترل دقیق فراهم کنند. متأسفانه این سامانهها حجیم بوده و خطوط هیدرولیکی مورد استفاده نیز ضخیم هستند. همچنین بازوهای رباتیک با سامانۀ کنترل هیدرولیکی در صورت قطع شدن توان در یک محل ثابت شده و نمیتوان آنها را حرکت داد.
سامانههای پنیوماتیکی به تنهایی به دلیل تحمل بار کم و دقت پایین جایگزین مناسبی برای سامانههای هیدرولیکی نیستند. ولی گروهی از شرکت Disney Research به رهبری John P Whitney از دانشگاه Northeastern یک سامانۀ ترکیبی هیدرولیکی/پنیوماتیکی ارائه کردهاند که ساخت یک ربات حضور از راه دور با قابلیتهای شبهانسانی را ممکن کرده است.
به جای استفاده از دو خط هیدرولیک برای باز و بسته کردن مفاصل، این سامانۀ ترکیبی هیدرولیک/پنیوماتیک خط هیدرولیک را برای حرکت مفصل در جهت اصلی آن بکار میگیرد در حالی که خط پنیوماتیکی آن را برمیگرداند. بنا به گفتۀ گروه نه تنها این سامانه سادهتر است بلکه هوا به عنوان یک فنر بادی نیرویی پیوسته برای متعادل کردن حرکات این سازوکار فراهم میکند. در طراحی ترکیبی تنها یک موتور نیاز است و میتواند در هر محلی که مناسب است قرار گیرد.

افزون بر این یک عامل ایمنی نیز در طراحی ترکیبی وجود دارد. بر خلاف سامانههای هیدرولیکی که با قطع برق در محل قفل شده و قابل حرکت نیستند، خطوط هوا میتوانند تخلیه شده و یا به نحوی طراحی شوند که هنگام قطع توان تخلیه شوند. برای مثال بازوهای رباتیک میتوانند هنگام قطع توان به جای قفل شدن باز شوند و یا رباتهای جراح میتوانند به نحوی طراحی شوند که در صورت قطع برق از بدن بیمار خارج شوند.
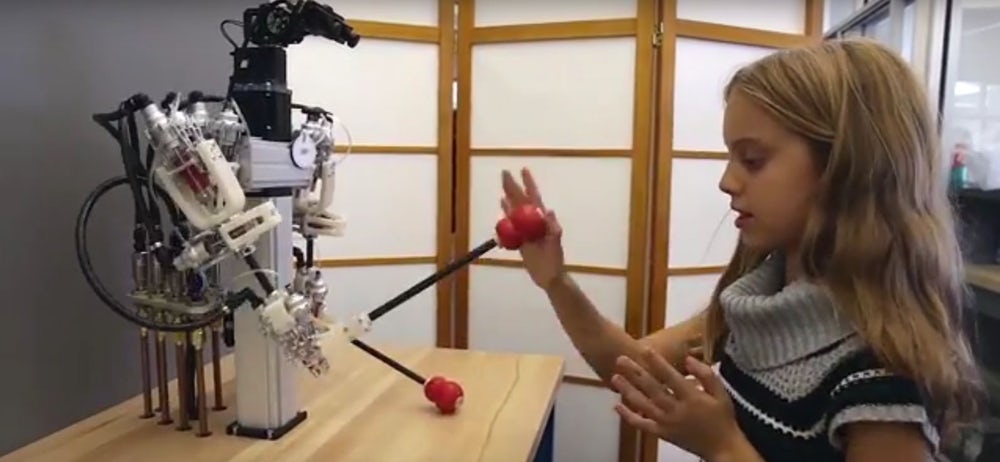
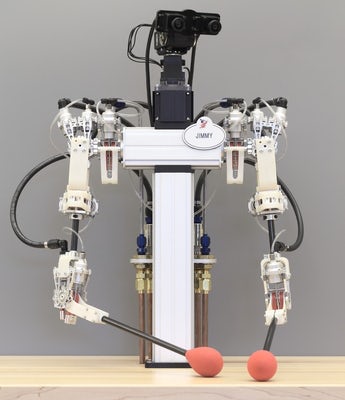
در آخرین استفاده از این سامانۀ ترکیبی، شرکت Disney Research یک ربات انسان نما با یک بالا تنه و دو بازو با چهار درجۀ آزادی و یک سر مجهز به دوربین استریو ساخته است.
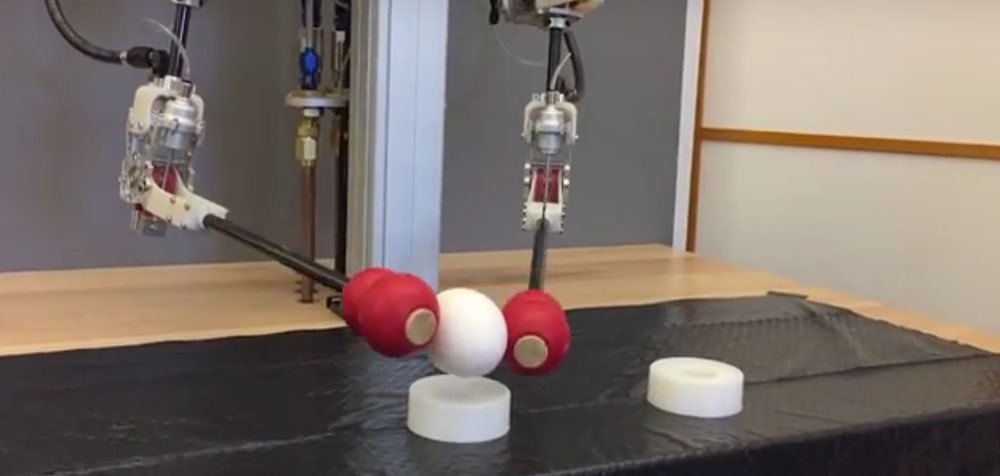
این ربات محرکهای چرخان هیدرولیکی را با سیلندرهای دارای دیافراگم چرخنده برای راهاندازی مفاصل بکار میگیرد. این ربات همراه با یک ربات کنترلکننده در پشت دیوار یک ساختار پایه/پیرو را تشکیل میدهند. کاربر بازوهای ربات کنترلکننده را حرکت میدهد و ربات پیرو این حرکات را با دقت و به صورت لحظهای تکرار میکند و حرکات این ربات به قدری ملایم است که میتواند یک تخممرغ تازه را جابجا کند و به قدری ماهر است که میتواند بازی پرتاب بادکنک را انجام دهد.
کاربر یک هدست واقعیت مجازی میپوشد که اجازه میدهد از طریق چشمان ربات ببیند و سر ربات با دو درجۀ آزادی حرکات سر کاربر را دنبال میکند.
نتایج پژوهش این گروه در کنفرانس IEEE Conference on Robotics and Automation در استکهلم ارائه خواهد شد.
فیلم زیر عملکرد این ربات را نمایش میدهد:
منبع: gizmag


