
در حالی که در رقابتهای رباتیکی DARPA، رباتهای امدادگر مشغول رقابت بودند، در محوطۀ نمایشگاهی رقابت دیگری در جریان بود: رقابتی بر سر پایداری و تحمل که آنهم تحت حمایت DARPA برگزار میشد و در آن رباتهایی از آزمایشگاههای ملی Sandia و SRI International برای نشان دادن میزان «ابر بازدهی» خود به آرامی بر روی تردمیل راه می رفتند.
منظور از «ابر بازدهی» در حوزۀ رباتهای راه رونده چیست؟ فرض کنید رباتی انساننما داشته باشیم که هنگام راه رفتن، بازدهی ۲۰ تا ۳۰ برابر بیشتر از ربات ATLAS ساختۀ Boston Dynamics داشته باشد. یک ربات با این اندازه و میزان بازدهی با یک بار شارژ باتریهای خود میتواند بین ۴ تا ۶ ساعت راه برود.

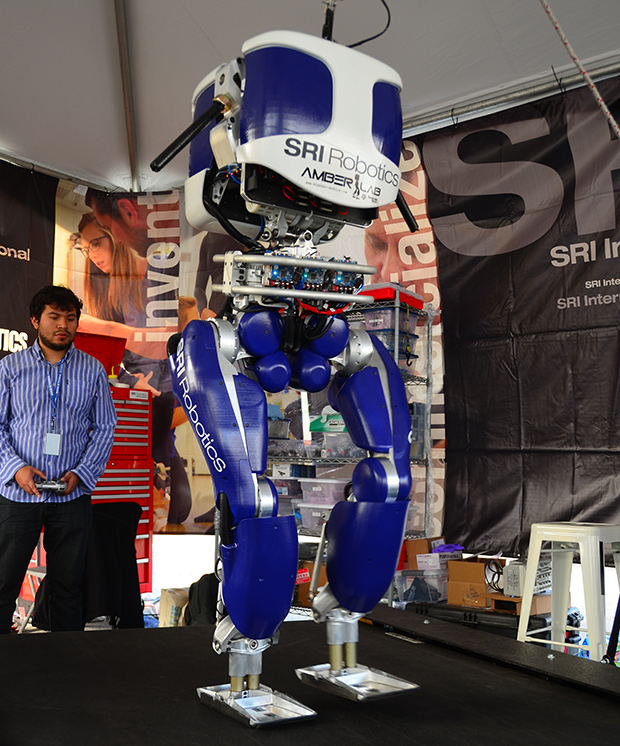
رباتی که SRI در رقابتهای DRC به نمایش گذاشت DURUS (از ریشۀ durable به معنای پایا و با دوام) نام دارد که طی یک قرارداد (طبیعتاً سری) که DARPA از سال ۲۰۱۳ منعقد کرده بود توسعه یافته است.
سال ۲۰۱۳ همان سالی بود که Boston Dynamics از ربات ATLAS خود رونمایی کرد و این همزمانی اصلاً اتفاقی نبود. DARPA ربات ATLAS را دیده بود و خیلی زود دریافته بود که مصرف توان این ربات برای استفاده در دنیای واقعی کاملاً ناکارامد است و برای همین شروع به سرمایهگذاری برای توسعۀ محرکهای ابر کارآمد نمود. این طرح بعداً کمی گسترش یافت و تبدیل به رقابتی برای بازدهی حرکت رباتهایی مشابه ساختار ربات ATLAS اما ۲۰ تا ۳۰ برابر کارامدتر شد.
اوج این رقابت، میان بازدهی راه رفتن دو ربات DURUS ساختۀ SRI و ربات Sandia بود. پروفسور Aaron Ames (که تا همین اواخر در دانشگاه Texas A&M بود و اکنون به Georgia Tech پیوسته است) دربارۀ ویژگیهای بارز DURUS توضیح میدهد:
رقابت به این صورت تعریف شد که به ربات DURUS یک باتری کاملاً شارژ شده داده شد و ربات بر روی یک تردمیل قرار گرفت (و برای حفظ ایمنی با بندهایی مهار شد). هدف این بود که ببینیم ربات تا زمان خالی شدن باتری چقدر راه را میپیماید. ما این مقدار را اندازهگیری کردیم و دیدیم که ربات DURUS توانست در مدت زمان ۲ ساعت و ۳۵ دقیقه و ۴۳ ثانیه، ۲٫۰۵ کیلومتر را بپیماید. ربات هنگام راه رفتن حدود ۳۵۰ وات توان مصرف کرد که میتوان گفت به طور میانگین هزینۀ جابجایی (Cost of Transport) حدود ۱٫۵ را داشت.
هزینۀ جابجایی یک معیار ساده و دم دستی برای بیان میزان بازدهی جابجایی یک جسم از یک محل به محل دیگر است. هزینۀ جابجایی ربات ATLAS چیزی حدود ۲۰ است. این مقدار برای ربات چهار پای cheetah ساختۀ MIT حدود ۰٫۵ و برای انسان حدود ۰٫۲ است. SRI تخمین میزند که با انجام کمی تغییرات و تنظیمات بیشتر بر روی DURUS میتوان هزینۀ جابجایی این ربات را به کمتر از ۱ کاهش داد. با این حساب این ربات ۸۰ کیلوگرمی با باتری ۲٫۲ کیلوواتی لیتیوم پلیمری خود باید بتواند حدود ۱۰ کیلومتر را بپیماید (!).
توجه به این نکته مهم است که DURUS از فناوریهای نوینی که در حوزۀ منابع تغذیه وجود دارند مانند فناوریهای ذخیرۀ انرژی با چگالی بالا یا طراحیهای فوق سبک برای بدنۀ ربات استفاده نکرده است. چرا که هدف این رقابت این مسائل نبوده است. هدف این رقابت رسیدن به بهترین بازدهی در بخش تحریک و راه رفتن ربات بوده است. گروه SRI برای رسیدن به این هدف همۀ بخشهایی را که ممکن است باعث کاهش بازدهی در یک سیستم معمولی شوند از نظر گذرانده است؛ بخشهایی مثل موتورها، انتقال دهندههای مکانیکی، کنترلگرهای موتور، سیمکشیها، کینماتیک، دینامیک، نحوۀ گام برداشتن و خلاصه همه چیز. بازدهی بالای DURUS نتیجۀ بهبود همۀ این بخشهاست اگرچه قطعاً بخشهایی از بقیه تأثیرگذارتر بودهاند.
SRI ترکیبی از سه بخش موتورها، کنترلگرهای موتور و انتقال دهندههای مکانیکی را به عنوان یک منبع بزرگ اتلاف راندمان معرفی میکند؛ به ویژه انتقال دهندهها که بسیار بد عمل میکنند. به همین منظور گروه SRI تصمیم گرفت آنها را از نو ابداع کند. آنها به طور واضح به ما نگفتند که دقیقاً چه کاری انجام دادند جز اینکه گفتند: «همه جا اصطکاک لغزشی وجود دارد (مانند یک جعبه دندۀ ساده). ما تلاش کردیم تا این اصطکاک را به نوع چرخشی تبدیل کنیم. همین مسأله باعث شد تا بازدهی چندین برابر بهتر از بازدهی جعبه دندههای ساده شود.» آنها با رسیدن به راندمان ۹۷ درصدی امکان ساختن محرکهای کارآمد را به وسیلۀ موتورهای الکتریکی ارزانقیمت فراهم کردند.
اما بزرگترین دستاورد DURUS را میتوان شیوۀ راه رفتن آن دانست. اگر قبلاً راه رفتن رباتهای شرکت کننده در رقابت DRC را دیده باشید، حتماً متوجه شدهاید که آنها خیلی تصنعی و «مانند یک ربات» راه میروند. راه رفتن مصنوعی و یکنواخت رباتیکی نتیجۀ جانبی آن است که ربات همیشه تلاش میکند تا مرکز جرم خود را بالاتر از پاهای خود قرار دهد. این وضعیت شبیه به آن است که شما هنگام راه رفتن دائم نگران زمین خوردن باشید. اما انسانها اینگونه راه نمیروند. ما برای راه رفتن بدن خود را جلو میاندازیم و دائماً با برداشتن گام بعدی جلوی زمین خوردن خود را میگیریم. ربات DURUS نیز به کمک نرمافزار خود به همین شیوه راه میرود و همین امر باعث میشود تا ربات حرکتی طبیعی داشته باشد و بتواند بدون زمین خوردن راه برود.
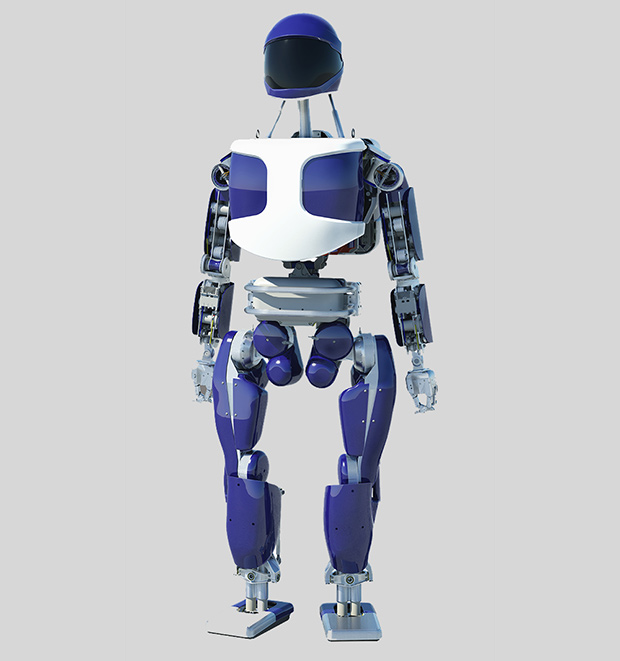
DURUS یک پلتفورم تحقیقاتی برای DARPA است. DURUS درواقع پایین تنۀ یک ربات انسان نما به نام PROXI است که گروه SRI مشغول کار بر روی آن است (شکل بالا).
ربات PROXI ترکیبی از تجارب گروه SRI در زمینۀ کار با دستها و بازوهای رباتیک به همراه بازدهی بالای بخش پایین تنۀ DURUS خواهد بود و تبدیل به یک ربات انسان نمای الکتریکی کم هزینه با کارایی بالا و امکان ۸ ساعت پیاده روی مستمر خواهد شد. اکنون سرمایهگذاری DARPA بر روی این پروژه با برگزاری دور نهایی رقابتهای DRC پایان یافته و گروه SRI به تجاری کردن این محصول میاندیشد. Rich Mahoney، مدیر برنامههای رباتیک SRI دربارۀ برنامههای آتی اینگونه توضیح میدهد:
«ما گمان نمیکنیم پلتفورمی وجود داشته باشد که قطعات، کارایی، دینامیک و پاسخی مشابه آنچه PROXI خواهد داشت، داشته باشد. چشم اندازی که ما میبینیم، همکاری با چند گروه پژوهشی در سالهای آینده است و طی ۳ تا ۵ سال اگر تعداد سفارشهای کافی به دست ما برسد، این ربات با قیمتی کمتر از ۱۰۰ هزار دلار به فروش خواهد رفت. حتی این پتانسیل نیز وجود دارد که در صورت وجود سفارشهای زیاد، با قیمتی حدود ۵۰ هزار دلار عرضه شود. ما چیزی در اختیار داریم که میتواند یک بازار تازه ایجاد کند. پلتفورمهای رباتیکی تازه کم کم در حال پدیدار شدن هستند و نسل بعدی دنیای رباتیک و کاربردهای آن را میسازند و من فکر میکنم که پلتفورم PROXI نیز یکی از آنها خواهد بود.»
[SRI]
منبع: IEEE Spectrum


