DARPA با هدف توسعهی فناوریهای موثر در عملیات زیر زمینی چالشی را معرفی کرده است. The DARPA Subterranean (SubT) Challenge یا به اختصار چالش SubT. رباتهای شرکت کننده در این چالش به مسیریابی زیر زمین میپردازند. بخشهایی از این چالش دشواریهای بسیار دارد. از جملهی این چالشها برقراری ارتباط با ربات در حین عملیات است. امواج رادیویی از دیوارههای سنگی محل عملیات عبور نمیکند. همین امر ارتباط ربات با پایگاه عملیاتی را دشوار میکند. برای آشنایی بیشتر با استراتژی مقابله با این مشکل با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
چالش ارتباطی در SubT، مسابقه ی رباتیک زیرزمینی
رباتهای شرکت کننده باید پس از جست و جو در محل اشیایی را بیابند. یافتن این اشیا باید به پایگاه عملیاتی گزارش شود. گروههای شرکت کننده در این چالش راههای مختلفی برای حل این مشکل طراحی کردهاند. رایجترین راه حل ارتباط بین رباتهاست. در این روش پیام بین رباتها مخابره میشود. در این روش ارتباط یک ربات با مرکز کافیست. در ادامه به مرور استراتژی گروههای مختلف برای حل این مساله میپردازیم.
گروه PLUTO
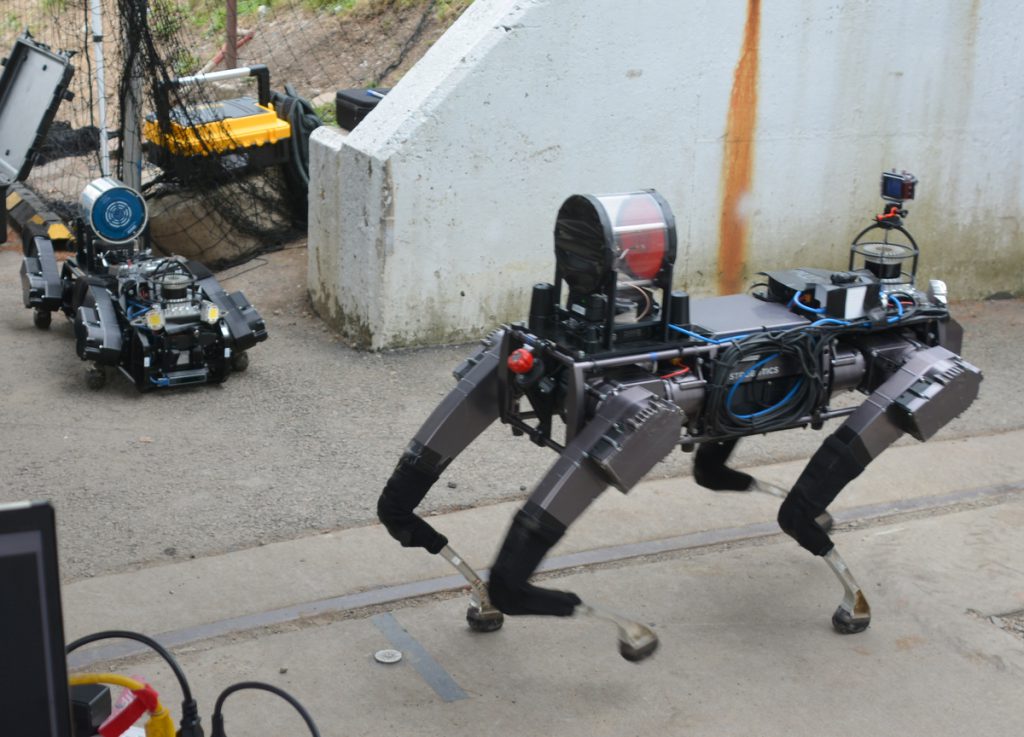
ربات چهارپای این گروه با نام Ghost Robotics Vision 60 برای کار طولانی مدت بدون خط ارتباطی طراحی شده است. برای کسب امتیاز اما گروه باید گزارش اشیای یافت شده را دریافت کند. گروه PLUTO از آنتنهای دوقطبی روی ربات استفاده میکند. این آنتنها قدرت ارتباط را به دفعات بهبود میبخشد. نقطهی Ghost Robotics Vision تحرک بالا است.

گروه Explorer
گروه Explorer در حال حاضر در صدر جدول اشیا است. Explorer بیشترین تعداد اشیای یافت شده را به خود اختصاص داده است. ۲۵ از ۵۰ آمار این گروه است. Explorer از افزایش تعداد نقاط شبکهی ارتباطی بهره میبرد. نودهای ارتباطی توسط رباتها حمل میشود. در حال حاضر یک کاربر از دور دستور انداختن نود را صادر میکند.
در آینده ربات Explorer به صورت خودکار در نقاط لازم نودها را قرار میدهد. هر ربات ده نود ارتباطی را با خود حمل میکند. در حال حاضر امواج ارتباطی در مکانهای گلآلود خوب عمل نمیکند. Explorer در چشم انداز خود کوچک کردن نودها و بهبود روش کار آنها را تعریف کرده است.

گروه CoSTAR
ایدهی استفاده از نقاط قابل حمل شبکه در این مسابقه پرطرفدار بود. CoSTAR چندین پیکربندی مختلف را با رباتهای خود به داخل مسیر مسابقه فرستاد. CoSTAR در حال حاضر دومین گروه مسابقه است. ۱۱ از ۵۰ آمار اشیا یافت شده توسط CoSTAR است.
گروه CERBERUS
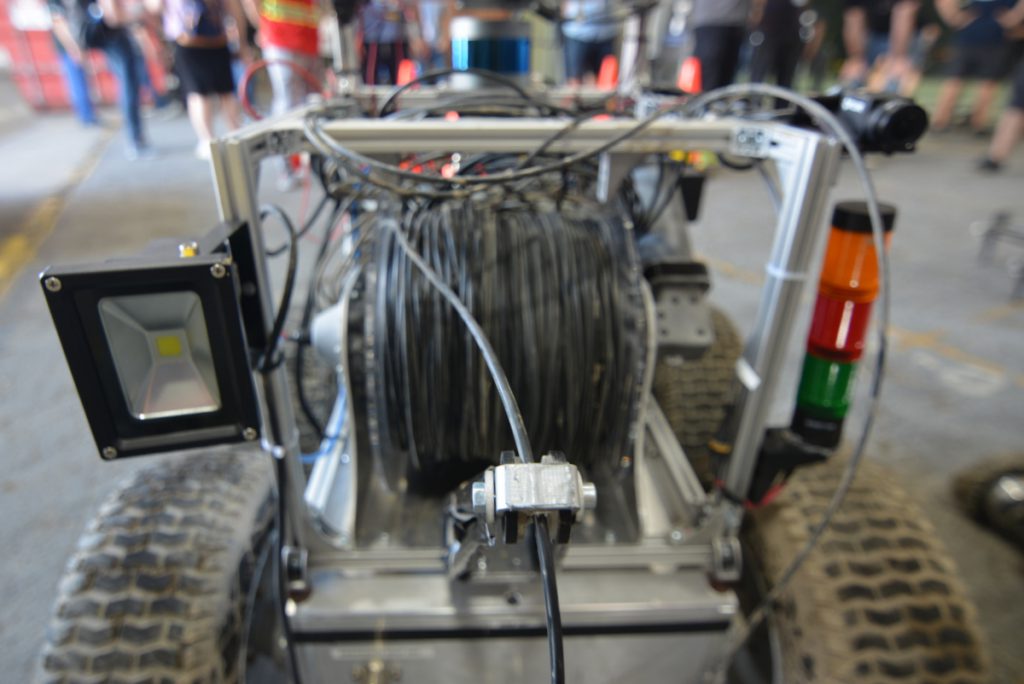
طولانی بودن مسیر برقراری ارتباط با سیم را دشوار میکند. گروه CERBERUS با آگاهی به این مطلب سیمی بلند را روی ربات خود سوار کردند . هر چند این سیم برای پوشش کل مسیر مناسب نیست، در ابتدای تونل کارآمد خواهد بود.

گروه NCTU
این گروه از تعدادی Anchorball استفاده میکند. Anchorball یک توپ کوچک است که برای تعیین مکانهای خاص عبور دستگاه استفاده میشود. NCTU این توپکها را طوری روی زمین میاندازد که دوربین توپک همواره به سمت سقف باشد. ربات تصاویر این دوربینها را با نقشهای که تهیه میکند انطباق خواهد داد. پس از گذشت مدتی از آغاز مسابقه این گروه یک روش ارتباط با سیم را نیز برای ربات خود طراحی کرد.

گروه CSIRO Data61
نودهای این گروه طراحی خوب داشت. نودها پس از قرار گیری روی زمین و دور شدن ربات با یک عملگر فنری سرپا میشود. پس از آن آنتن نود باز میشود. سطح بازتاب کنندهی نود یافتن آن را پس از اتمام عملیات ساده میسازد. همچنین به رباتهای دیگر حضور نود را اطلاع میدهد تا از روی نود رد نشوند.

گروه CRETISE
این گروه به جای استفاده از نودهای ثابت شبکه، از LANdroids استفاده میکنند. LANdroids نقاط متحرک شبکه هستند و امکان بهینه سازی ارتباط را فراهم میکنند.
بیشتر بخوانیم:
آیندهی رباتهای امداد و نجات
معرفی برترین استارت آپ های رباتیک اروپایی
منبع: spectrum.ieee
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


