راه رفتن بدون عصا رویای برخی بیماران مبتلا به ناهنجاریهای عصبی است. اسکلت بیرونی Autonomyo یکی از اسکلتهای بیرونی جهان است که این رویا را به حقیقت تبدیل میکند. دستگاه پشتیبان فعال با پشتیبانی از عضلات ضعیف قابلیت تقلید از حرکات طبیعی بدن را دارد. نیروی تامین کننده این حرکات توسط شش میکروموتور تامین میشود. برای کمک به برهمکنش هماهنگ اسکلت بیرونی و کاربر، FAULHABER یک موتور همه کاره با حسگر گشتاور ساخته است. در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به توصیف این دستگاه میپردازیم.

در علوم پزشکی بیش از ۸۰۰ ناهنجاری عصبی-عضلانی شناخته شده است. همانطور که از اسم ان مشخص است، این ناهنجاریها عضلات و اعصاب را هر دو درگیر میکنند. برخی کل بدن را درگیر میکنند و برخی تنها نواحی مشخصی را. خوشبختانه بیشتر این ناهنجاریها کمیاب هستند. بسیاری از بیماران مبتلا، تحرک محدودی دارند. زیرا با وجود اینکه دلایل زیادی برای آنان وجود دارد و از طرق مختلف گسترش مییابند، همگی یک اثر واحد دارند: ناتوانی عضلانی. ناتوانی عضلانی(muscular dystrophy) در بسیاری موارد پیشرونده نیز هست.
محمد بوری، سرپرست گروه پژوهشی رباتیک توانبخشی و کمکی(REHA Assist) در EPFL توضیح میدهد:« در صورتی که ناتوانی عضلانی در پاها رخ دهد، راه رفتن به شدت دشوار میشود. نهایتا راه رفتن بدون تکیه بر چیزی، دشوار خواهد بود. در این صورت عضلات هنوز کار میکند اما توان کافی برای اینکه بیمار به شکل متعادل بایستد یا پاهای خود را به صورت مستقل حرکت دهد را نخواهد داشت. همانطور که انتظار میرود، این امر تاثیر بسیاری بر گستره حرکت بیمار و کیفیت زندگی وی دارد. تاثیراتی مشابه همیپلژی پس از سکته. هدف ما غلبه بر این محدودیتها با کمک خود بیمار برای حرکت تا حد ممکن است.»

پشتیبانی نسبی سبک
سرپرست گروه از اسکلتهای بیرونی معمول به عنوان فناوری متاثر از رباتهای انساننما یاد میکند. این ابزار بیماران پاراپلژی را در راه رفتن بدون عصا یاری میدهد. اما وزن این ادوات بیش از ۴۰ کیلوگرم است.
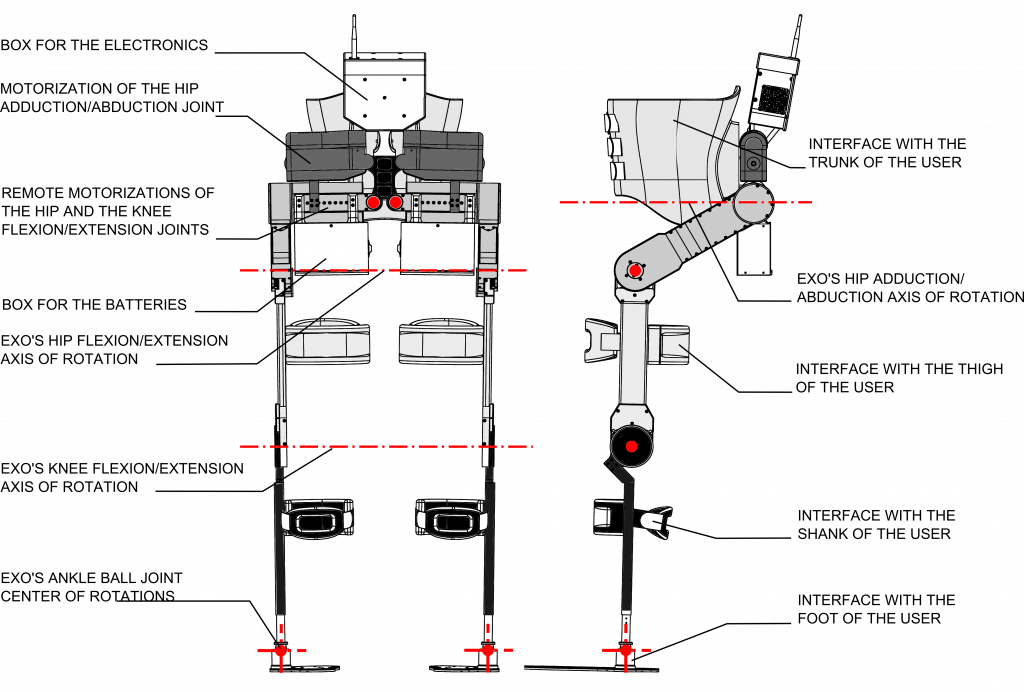
دستگاه Autonomyo با وزن ۲۵ کیلوگرم توسط REHA Assist ساخته شده است. وزن این دستگاه کم دستگاه یک نکته مثبت است. Autonomyo با کمک سیستم اسکلتی-عضلانی ضعیف اما هنوز سرپای بیمار کار میکند.
این دستگاه با یک بند به دور بالاتنه بیمار و پاها بسته میشود. همچنین سه موتور حرکت بیمار را در عضلاتی که ضعف دارند همراهی میکند. در مورد هر حرکت یک موتور مسئول باز و بسته شدن لگن و یک موتور مسئول امری مشابه در زانوهاست. موتور سوم مسئول دور و نزدیک شدن پاها از لگن در ناحیه مفصل لگن است. به عبارت دیگر حرکت موضعی پاها را از ناحیه میانی بدن کنترل میکند. به طور کلی موتورها به بیمار کمک میکند تا تعادل را هنگام راه رفتن حفظ کند. در آزمایش بالینی این وسیله، Autonomyo توقعات را برآورده کرد. اسکلت بیرونی Autonomyo با پشتیبانی از بدن در عین فراهم کردن آزادی عمل، مقصود کاربر را هنگام حرکت برآورده کرد. وسعت حرکات مفاصل و هماهنگی حرکت اثر منفی از این وسیله دریافت نکرد.

توان حرکت و پتانسیل توسعه یافتن
در وسیله شش واحد حرکت توسط FAULHABER تعبیه شده است. این اجزای اصلی شامل موتو ۳۲۷۴ BP4 براشلس با قطر ۳۲ میلیمتر است. این موتور بیشترین توان ممکن را در بین موتورهای هم اندازه خود در بازار دارد. قدرت موتور با چرخ دنده و شافت ساخته شده به این منظور انتقال مییباد. مکان یابی توسط یک دستگاه چرخنده مغناطیسی(magnetic IE3 encoder) انجام میشود. حسگر گشتاور ادغام شده در چرخدنده چهار موتور برای حرکات جمع شدن یا باز شدن به کار میرود.
ویژگیهای میکروموتورهای این وسیله در رده دستگاههای با کیفیت مانند آن است. توان بالا و کوچکترین حجم ممکن و کمترین وزن، دقت بالا، ضریب اطمینان بالا در کنار طول عمر زیاد از مهمترین ویژگیهای این وسیله است. در واقع با درنظر گرفتن این ویژگیها تنها تعداد معدودی موتور از این نوع در بازار وجود داشت.
گروه کیهانشناسی داخل دانشکده در این دانشگاه قبلا با FAULHABER کار میکرد. بنابراین این گروه توصیههای مناسبی ارائه کرد. ضمن اینکه رابطه خوبی هم میان دو گروه وجود داشت. FAULHABER از همان هنگام در موقعیت مناسبی برای توسعه حسگر گشتاور مناسب نیز بود. این موارد همگی برای طرح امتیاز مهمی بود.
در حال حاضر شرکت سازنده این موتورها آنها را برای EPFL و در مقیاس محدود تولید کرده است. اما مهندس تولید کننده Frank Schwenker کاربردهای دیگری نیز برای این موتورها در نظر دارد. اندازهگیری گشتاور با دقت بالا میتواند در تمامی حوزههای وابسته به حس لامسه کاربرد داشته باشد. به طور مثال کلیه انواع رباتیک کمکی که در خدمت جراحان است میتواند برای تولید نیرو با دقت زیاد از این دستگاه سود ببرد. حسگر این دستگاه برای محدود کردن گشتاور و برای حفاظت به کار میرود.
بازخورد از سامانه مغناطیسی اندازه گیری برای ردیابی حرکت Autonomyo
هدایت دستگاه بنا به خواست و نیاز کاربرد بسیار مهم است. حرکت دستگاه باید دقیقا چیزی باشد که کاربر قصد آن را داشته است. محرک اولیه برای تغییر مکان(یا همان شروع راه رفتن) با تغییر اندکی در پایین تنه ایجاد میشود. این تغییر با ادغام اطلاعت واحد اندازهگیری لختی، هشت حسگر و واحد رمزنگاری موتور تشخیص داده میشود. در واقع به این شکل مکان و نحوه حرکت مفاصل را مییابیم. کلیه این دادهها به کمک کاربر میآید تا تعادل وی حفظ شود. در واقع هنگام راه رفتن برهم کنش کاربر و دستگاه اهمیت زیادی دارد. به همین دلیل حسگر شرکت FAULHABER مسئول تشخیص این برهمکنش و تعیین دقیق استراتژی و عملکرد دستگاه است.
ادغام حسگر دقیق گشتاور در یک موتور کاری است که دو سال زمان برده است. در هنگام شروع طراحی هدف ارتقای عملکرد تولیداتی مانند Cobootics برای برهمکنش ایمن انسان و دستگاه بود. در Autonomyo حسگر داخل موتور به دقت طراحی و برای حل چالش کارکرد انسان و ماشین در کنار یکدیگر به کار گرفته شده است.
فناوری معمول برای تشخیص گشتاور از بندهای قابل ارتجاع روی اجزای مختلف دستگاه بهره میبرد. این بندها تحت نیروی اعمالی تغییر شکل میدهند. نقطه ضعف آنان به کارگیری چسب در محل اتصال آنهاست. توسعه دهندگان این دستگاه در گروه مهندسی پیشرفته EPFL این بندها را با سامانهها سنجش دقیق جایگزین کردهاند. به این شکل دقت بهتری از ۱.۵ درصد در طیف اندازهگیری به علاوه/منهای ۳۰ نیوتون-متر بدست میآید.
این عدد و دقت در کنترل اسکلت بیرونی Autonomyo بسیار مهم است.
ربات های فوق پیشرفته و شگفت انگیز
پذیرش انبوه اسکلت های بیرونی نظامی یک قدم به واقعیت نزدیکتر شد
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


