من در هر فیلم علمی تخیلی که دیدهام، اتصال مغز انسان به یک ربات باعث شده تا آن ربات بسیار هوشمند و غیر قابل توقف شود و حتی ماهیتی شیطانی پیدا کند. مطمئنم که دیر یا زود کسی پیدا خواهد شد که این کار را انجام دهد. کار جالبی که اکنون میتوان در این زمینه انجام داد آن است که یک مغز انسانی را به یک ربات قرض دهیم تا بتواند با آن تعادل خود را حفظ کند و وظایفی را که نیازمند حس کردن و چالاکی است انجام دهد. این کار شبیه به روش کارکرد از دور (teleoperation) است با این تفاوت که مغز و بدن کاربر ربات را به طور مستقیم از داخل یک وسیلۀ haptic پوشیدنی هدایت میکند.
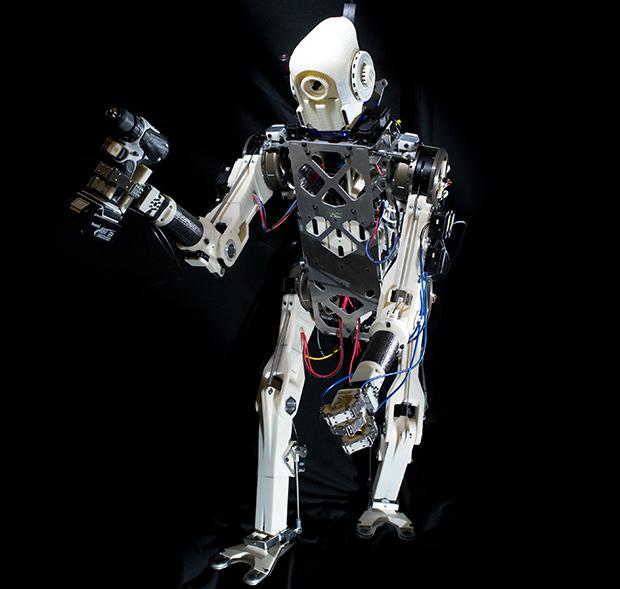
HERMES رباتی امدادگر برای شرایط بحرانی است که پژوهشگران MIT آن را بر اساس ربات Cheetah ساختهاند که پیشتر زیر نظر پروفسور Sangbae Kim و گروه وی در آزمایشگاه Biomimetic Robotics دانشگاه MIT ساخته شده بود. برای آنکه بتوانید HERMES را تصور کنید، ربات Cheetah را در نظر بگیرید که بر روی دو پای خود ایستاده و دو پای دیگر را نیز به عنوان بازو در اختیار دارد. یک ربات دو پا با ۲۴ درجۀ آزادی، ۴۵ کیلوگرم وزن به همراه محرکهای الکتریکی کوچک، فشرده و بسیار قدرتمندی که به Cheetah امکان دویدن و پریدن میدهد. HERMES اندازهای در حد ۹۰ درصد اندازۀ یک انسان بالغ دارد. بدین معنی که این اندازه در حدی هست که بتواند با محیطهای انسانی برخوردی طبیعی داشته باشد.
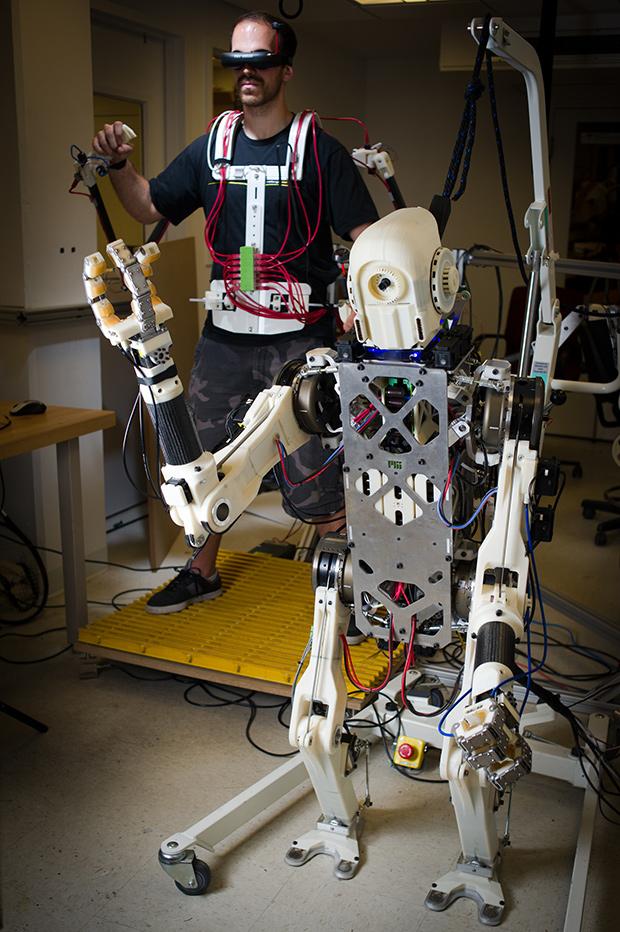
نیمۀ دیگر این سامانه، که آن را بسیار جالب و جذاب کرده است، واسط کنترلی آن است. بر روی سر ربات دوربینهایی نصب شده تا کاربر بتواند از راه دور دید خوبی بر وضعیت ربات داشته باشد که البته ایدۀ عجیبی نیست. بازوها و دستهای ربات نیز با یک سامانۀ پایه – پیرو شبیه به سامانۀ Waldo به شکل مستقیم کنترل میشود. البته این ساختار را پیش از این نیز دیده بودیم. چیزی که در این سامانه نوآوری محسوب میشود واسط پسخور تعادل (BFI) آن است که به نوعی میتوان آن را کمربندی از پسخور نیرو نامید که بر اساس نیروی وارد شده به پاهای ربات، نیرویی متناسب را به کاربر وارد میکند. همچنین با استفاده از حرکتهای کاربر، تعادل ربات را حفظ میکند. پژوهشگران سازندۀ این ربات میگویند:
«… اگر نیروی وارد شده به کاربر، خلاف جهتی باشد که برای حفظ تعادل ربات لازم است، ما انتظار داریم که کاربر به عنوان جبران کنندۀ تعادل عمل کند. این راهبرد بدان معنی است که اگر ربات در حال از دست دادن تعادل خود باشد، BFI تلاش میکند تا تعادل کاربر را نیز به هم بزند. در این شرایط ما خواسته ایم تا واکنش طبیعی انسان را در برابر اغتشاشها برانگیزیم.»
به بیان دیگر اگر ربات شروع به خم شدن کند، موتورهای سامانۀ BFI شما را در همان جهت هل خواهند داد. شما به طور طبیعی تلاش میکنید تا خود را سر پا نگه دارید و با این کار پسخور لازم را برای کمک به سر پا ایستادن ربات فراهم میکنید. ساده بود نه؟! نتایج اولیه (آزمایش ضربه زدن به ربات با چکش پلاستیکی برای انداختن آن) نشان میدهد که این راهبرد کار میکند. با این حال از آنجا که این پژوهشگران تا کنون تنها سختافزار این ربات را ساختهاند نمیدانند این راهبرد تا چه حد خوب کار میکند. چیزی که در مورد این راهبرد جالب است آن است که بدون نیاز به هر گونه ورودی بصری کار میکند و تقریباً میتوان گفت واکنشی ناخودآگاه است. مانند آن است که کسی از پشت سر شما را هل دهد. بد نیست این سامانه را در عمل ببینید (البته به نظر میرسد برقراری تعادل به طور کامل اجرا نشده است):
اتکا به بازخوردهای طبیعی انسانی نسبت به وضعیتی که از کاربر بخواهیم تا با مشاهدۀ وضعیت ربات تعادل آن را حفظ کند، دو تا سه برابر سریعتر است. پژوهشگران بر این باورند که این سامانه میتواند کل بدن را با ربات «به هنگام (synchronize)» کند و در آینده میتوان رباتها را از راه دور به تقلید از حرکتهای انسان واداشت. پژوهشگران همچنان با احتیاط پیش میروند و میگویند برای برقراری تعادل ربات هنوز به IMUها و کنترلگرهای تعادلی نیاز است:
«باید توجه کرد که کنترلگر ارائه شده به هیچ عنوان قصد جایگزینی کنترلگرهای خودکار تعادلی موجود در چارچوبهای دوپا و چهارپا را ندارد. هدف این پژوهش آن است که با توجه به وضعیت تعادلی ربات، محدودیتهای میزان کمک انسان به عنوان یک کنترلگر مبتنی بر بازخورد و کاربر راه دور را کاهش دهد. هنوز مشخص نیست که کاربر تا چه حد میتواند حرکتهای خود را با حرکتهای ربات به هنگام کند. البته میدانیم که انسانها سامانههایی بسیار تطبیق پذیر هستند و ما انتظار داریم با دادن اطلاعات بیشتری از تعامل ربات با محیط پیرامون خود به کاربر انسانی، قابلیتهای تازهای برای کارکرد از دور بیابیم. هدف بلند مدت این پروژه ترکیب کردن ظرفیتهای بالای انعطاف پذیری و سازگار پذیری انسان با کنترلگرهای خودگردان است تا بتوان از مزایای هر دو همزمان بهره برد.»
گام بعدی این پژوهش ارتقاء سامانۀ BFI به ۶ درجۀ آزادی است که منجر به برداشتن محدودیتهای حرکتی ناحیۀ باسن میشود و به شکل زیر خواهد بود:

مکانیزم ماژولی ۶ درجۀ آزادی موازی برای حرکت بدون محدودیت کاربر. سه محرک در نظر گرفته شده میتوانند به طور مداوم به صفحۀ سنجش نیرو وارد کنند.
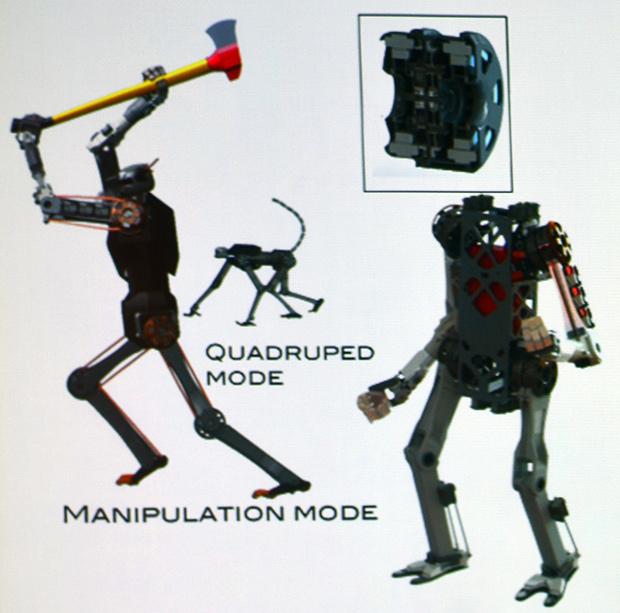
افزون بر این از حرکتهای بازوهای ربات به شکلی استفاده میشود که تعادل ربات حفظ شود. این راهبرد میتواند به شکل ایجاد اینرسی لازم برای دفع اغتشاشهای وارد شده بر ربات باشد یا آنکه هنگامی که ربات به هیچ شکلی نتواند تعادل خود را حفظ کند، به شکل چهار دست و پا بر روی زمین قرار گیرد.
این راهبرد میتواند در آینده ترکیبی از رباتهای Cheetah و HERMES را بسازد که بتواند به شکل چهار دست و پا بدود و افزون بر این قادر باشد تا بر روی دو پای خود بایستد و کارهایی را انجام دهد:
نتیجۀ این پژوهش با عنوان «A Balance Feedback Human Machine Interface for Humanoid Teeoperation in Dynamic Tasks» که نتیجۀ کار Joao Rames، Albert Wang و Sangbae Kim از دانشگاه MIT است، در کنفرانس IROS 2015 در آلمان ارائه خواهد شد.
منبع: IEEE Spectrum