با ایجاد تعامل بین مغز و اسکلت بیرونی میتوان تحولی عظیم در زندگی روزمره بیماران سکته مغزی ایجاد کرد. برای این کار باید قصد حرکتی فرد بیمار در مغز شناسایی و اطلاعات مسقیماً به دستگاه رباتیک ارسال شود.
آزمایشگاه مهندسی و توانبخشی ETH قصد دارد با انجام پروژهای در درمان و زندگی روزمره بیماران سکته مغزی تغییری اساسی ایجاد کند. هدف این پروژه استفاده از قدرت تفکر برای کنترل یک ربات است که به فرد بیمار کمک میکند تا دست فلجش را حرکت دهد. در واقع یک پوشش بیرونی دست که به بیماران سکته مغزی کمک میکند تا تمرینات توانبخشی را با زندگی روزمره خود ادغام کنند.
از هر شش نفر، یک نفر در طول زندگی خود از سکته مغزی رنج میبرد. در سوئیس به تنهایی هر ساله ۱۶،۰۰۰ نفر تحت تأثیر سکته مغزی قرار میگیرند. دو سوم این افراد از فلج دست رنج میبرند. آموزش فشرده، بسته به میزان آسیب مغز، به بیماران کمک میکند تا دوباره میزان خاصی از کنترل بر دست و بازوی خود را بدست آورند. این آموزش فشرده ممکن است به صورت کار درمانی، فیزیوتراپی و یا شامل ربات باشد.
Roger Gassert، استاد مهندسی توانبخشی در ETH زوریخ تعدادی دستگاه رباتیک برای آموزش عملکرد دست توسعه داده است و این را روشی خوب برای حمایت از درمان بیماران میداند. با این حال، هر دو روش درمان فیزیوتراپی و استفاده از ربات کمکی معمولاً به یک یا دو جلسه آموزش در روز محدود میشود و برای بیماران مراجعه و شکل درمان میتواند زمانبر باشد.
استفاده از اسکلت بیرونی به عنوان یک ربات تمرینی
Gassert در حال ارائه یک اسکلت بیرونی برای دست میگوید: «به نظر من به جای انجام تمرینات در یک وضعیت انتزاعی در درمانگاه، بیماران باید آنها را با زندگی روزانه خود در خانه ادغام کنند و بسته به شدت نارسایی توسط ربات پشتیبانی شوند». او ایده دستگاه رباتیک را به همراه پروفسور جومپی آراتا از دانشگاه کیوشو ژاپن و در آزمایشگاه Gassert، در طول یک فرصت مطالعاتی در سال ۲۰۱۰ توسعه داد.
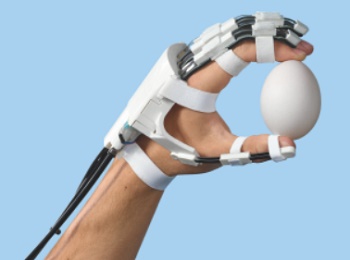
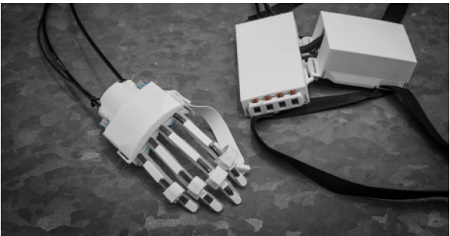
وی اظهار میکند: «اسکلتهای بیرونی موجود سنگین هستند و این یک مشکل برای بیماران است چرا که با استفاده از این اسکلتهای بیرونی قادر به بلند کردن دست خود نیستند». همچنین بیماران به سختی اشیا را احساس و مقدار مناسب نیرو را وارد میکنند. Gassert میگوید: «به همین دلیل ما میخواستیم مدلی را توسعه دهیم که دست آزادانه حرکت کند و اجازه دهد به بیماران تا فعالیتهای روزانه را که نه تنها عملکرد تحریکی بلکه عملکرد حسی از آن حمایت میکند را انجام دهند». آراتا مکانیزمی به کمک سه فنر برای انگشتها توسعه داده است. یک موتور فنر وسط را حرکت میدهد به طوری که نیرو از طریق دو فنر دیگر به بخشهای مختلف انگشتها انتقال یابد. در نتیجه انگشتان به طور خودکار به شکل شیای که بیمار میخواهد در دست بگیرد در میآیند.
با این حال، موتورهای یکپارچه وزن اسکلت بیرونی را به ۲۵۰ گرم میرساند که در آزمایشهای بالینی ثابت شد که برای بیماران بیش از حد سنگین است. راهکار این بود که موتور را از دست حذف و آنرا را به پشت بیمار متصل کنند. نیرو با استفاده از کابل ترمز دوچرخه منتقل میشود. ماژول دست در حال حاضر وزنی کمتر از ۱۲۰ گرم دارد و به اندازه کافی برای بلند کردن یک لیتر آب معدنی قوی است.
مطالعه فرآیندهای مغز
در حال حاضر Gassert به دنبال پاسخ به این پرسش است که در مغز چه اتفاقی میافتد و چگونه پس از سکته مغزی دستورات از مغز به اندامها میرسد. وی توضیح میدهد: «به ویژه بیمارانی که به طور جدی تحت تأثیر قرار گرفتهاند و ارتباط بین مغز و دست به شدت و یا به طور کامل مختل شده است. پس ما به دنبال راهکاری هستیم تا به طور مستقیم دستورات را به دستگاه رباتیک ارسال کند». ایده این است که قصد بیمار برای حرکت دست را در مغز شناسایی و این اطلاعات را به طور مستقیم به اسکلت بیرونی تحویل دهیم. این ایده همچنین ممکن است منافع درمانی نیز داشته باشد. طبق گفتههای Gassert تعدادی از پژوهشها نشان داده که با تمرین منظم ممکن است اتصالات عصبی موجود بین مغز و دست تقویت پیدا کند. یک نکته مهم در این فرآیند وجود دارد؛ زمانی که مغز یک فرمان برای حرکت تولید میکند قادر به دریافت بازخورد حسی از دست نیز است.
برای درک آنچه که در مغز اتفاق میافتد، Gassert در حال انجام پژوهشهای بنیادی با کمک پزشکان، دانشمندان علوم اعصاب و درمانگران است. برای پژوهش آنها دانشمندان میتوانند بر روی تعدادی از تکنیکهای تصویربرداری مانند تصویربرداری تشدید مغناطیسی عملکردی (FMRI) کار کنند که به آنها اجازه میدهد تا فعالیتهای کل مغز را زیر نظر داشته باشند. با این حال این فناوری هم بسیار گران قیمت و هم بسیار پیچیده است و در نتیجه برای درمان مناسب نیست. Gassert اضافه میکند: «و البته قابل حمل هم نیست». بنابراین او روی تکنیکهای سادهتر مانند نوار مغزی (EEG) و به ویژه طیف سنجی کاربردی مادون قرمز نزدیک (fNIRS) تمرکز کرده است. Gassert درگیر این چالش است که چگونه میتوان fNIRS را استوارتر به کار گرفت. یک گروه از بیمارستان دانشگاه نیز در کاربردهای بالینی این فناوری به او کمک میکنند.
بینش اساسی درباره کارکرد مغز
پرسش دیگری که هنوز به طور کامل درک نشده این است که چگونه مغز اندامهایی که با محیط در تعامل هستند را کنترل میکند. Gassert توضیح میدهد: « رباتیک سهم بسزایی در پژوهشهای پایه داشته است به این دلیل که آن یک ایدهآل پوشیدنی برای انجام یک حرکت و اندازه گیری واکنش است». برای نمونه کارشناسان رباتیک یک اسکلت بیرونی توسعه دادهاند که هنگام راه رفتن به مدت ۲۰۰میلی ثانیه زانو را متوقف میکند و آنرا با ۵ درجه آزادی گسترش دادهاند. دانشمندان با کمک حسگرها نیروهایی که درگیر هستند را اندازهگیری و از این دادهها برای پی بردن به اینکه چگونه مغز سختی زانو را تنظیم میکند، استفاده میکنند. سپس از این یافتهها برای برنامههای کاربردی مانند کنترل پروتزهای فعال و جدید بهره میبرند.
اگر پژوهشگران موفق به ایجاد تعامل میان مغز و اسکلت بیرونی شوند آنگاه اسکلت بیرونی به یک دستگاه ایدهآل و مناسب برای درمان تبدیل میشود. از سوی دیگر کمبودها دائمی هستند و ربات میتواند یک پشتیبانی بلند مدت ارائه دهد و به عنوان جایگزینی برای روشهای تهاجمی شناخته شود. این برای لحظهای کاشت الکترود در مغز و تحریک عضلات را در ذهن مجسم میکند. با این حال درمان به کمک رباتها برای بیماران سکته مغزی که انتظار بهبود دارند، انتخاب آشکاری است.
منبع: iconnect007.com


