تا همین امروز بیشتر اندامهای مصنوعی پرکاربرد از فناوریهای قدیمی استفاده میکنند. این اندامهای مصنوعی نسبت به یک دست طبیعی محدودیتهای حرکتی و کارکردی بسیاری دارند. برای حل این مشکل شرکت Coapt دست مصنوعی مبتنی بر الگوریتمهای بازشناسی الگو ساخته است.
زمانیکه جودی اوکانل (Jodie O’Connell-Ponkos) شانزده ساله بود دست راست خود را در اثر حادثهای با چرخ گوشت از دست داد. پس از آن او از دست مصنوعی استفاده میکرد ولی به مرور زمان از آن متنفر شد. دست مصنوعی او، یک سامانه استاندارد مایوالکتریک (myoelectric) شامل یک جفت الکترود بود. الکترودها میزان سیگنالهای الکتریکی ماهیچهها را اندازهگیری میکنند و حسگرهایی برای حرکت دادن دست مصنوعی فعال میشوند. جودی استفاده از این دست مصنوعی را غیرکاربردی میدانست و ترجیح میداد کارهای روزمره خود را با یک دست انجام دهد.
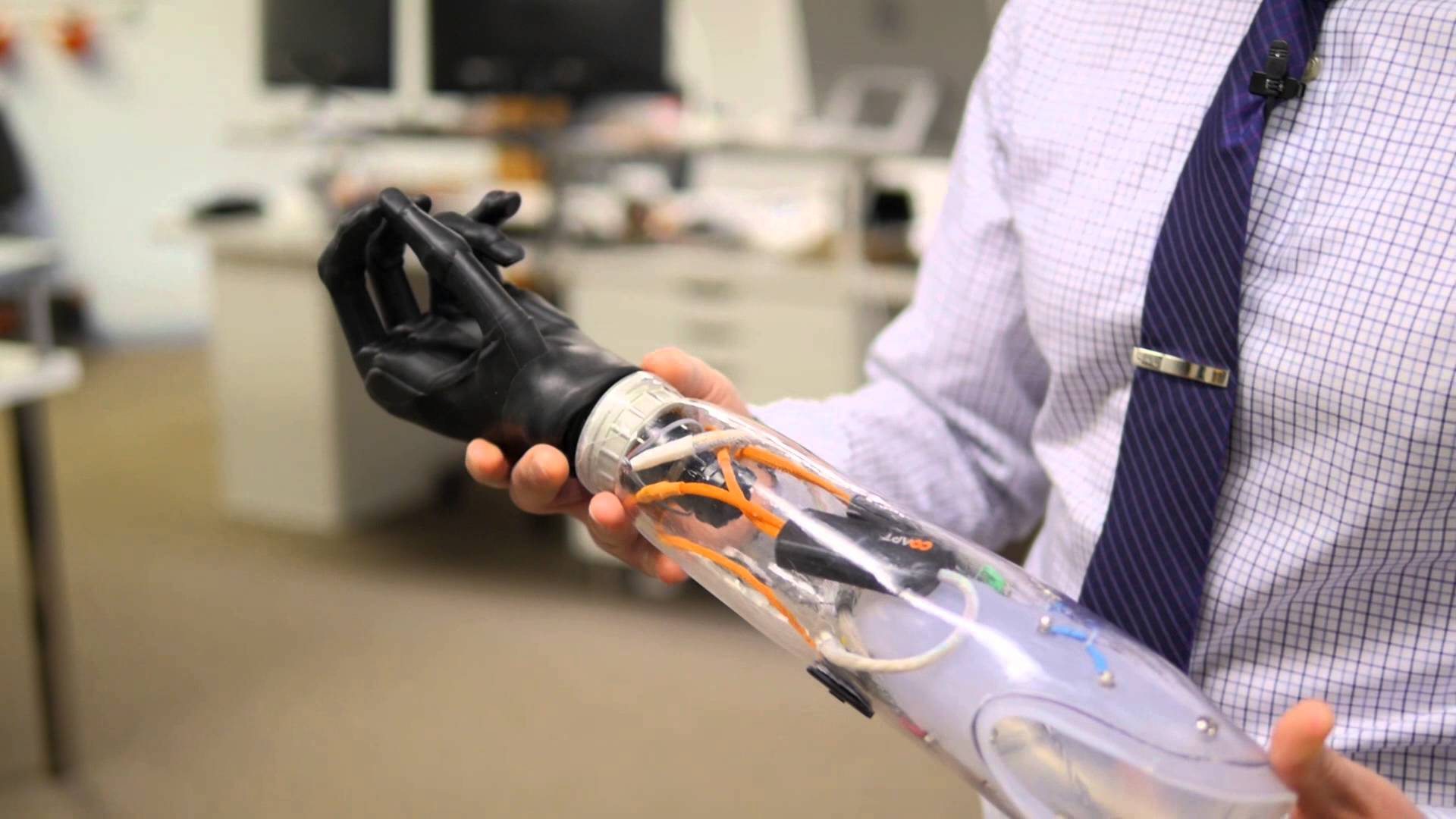
بیست سال بعد جودی متوجه شد که برخی شرکتها دست مصنوعی مایوالکتریک جدیدی را تولید کردهاند. او امیدوار شد که دست مصنوعی جدید، کاربردیتری باشد. دست مصنوعی جدید ساخت شرکت مهندسی Coapt مبتنی بر الگوریتمهای بازشناسی الگو (Pattern Recognition) است .
جودی اوکانل در مصاحبهای با MassDevice میگوید: «این دست مصنوعی به معنای واقعی مانند دست طبیعی خودم است و تواناییهایی من را بازگردانده است. همه فعالیتها مانند بستن بند کفش و اسبسواری که سالها با یک دست انجام میدادم از این پس میتوانم با دو دست خود انجام دهم.»
بلر لاک از بنیانگذاران شرکت Coapt میگوید: «تجربه جودی اوکانل در مورد پروتز دست مایوالکتریک قدیمی عجیب نیست. قبل از تاسیس شرکت نوپای Coapt، اکثر تولیدکنندگان در حال فروش پروتزهای مایوالکتریک با فناوری قدیمی مربوط به سال ۱۹۵۰ بودند.»
بلر لاک در رشته مهندسی برق در پروژه فارغالتحصیلی خود مفهوم بازشناسی الگو را با علم اندامهای مصنوعی ادغام کرد. او به جای استفاده از فقط دو الکترود برای اندازهگیری سیگنالهای الکتریکی ماهیچهها، از آرایهای شامل هشت الکترود استفاده کرد تا طیف کاملی از سیگنالهای ایجاد شده توسط مغز هنگام شروع حرکت ماهیچهها را در دسترس داشتهباشد. بلر لاک سیگنالهای تولیدشده از مغز برای شروع حرکت را «muscle music» مینامد.
نرمافزار با هشت الکترود اطلاعاتی بهتری در مورد اینکه کدام نوع حرکت موردنظر است به دست میآورد. برای هر نوع حرکت سیگنالهای مشخصی تولید میشود. هرچه تعداد الکترودها بیشتر باشد دست مصنوعی الگوی دقیقتری از حرکت بهدست میآورد. پژوهشگران Coapt الگوریتمی استفاده کردهاند تا الگوی مختص هر نوع حرکت را بهسرعت شناسایی کند.
بلرر لاک در یک بیمارستان توانبخشی تحقیقاتی در شیکاگو کار میکرد. افرادی که در پژوهش شرکت کردهبودند به او پیشنهاد دادند که نرمافزار بازشناسی الگو را برای دست مصنوعی نسخه شخصی نیز طراح کند. با توجه به نیاز موجود برای بهروز شدن فناوری قدیمی دست مصنوعی، بلر لاک دست به کار شد و این کمبود را برطرف کرد.
تجاری کردن چنین محصولی دارای ریسک بالایی است. جمعیت افراد قطع عضو زیاد نیست. بلر لاک میگوید: «جذب سرمایهگذار برای چنین محصولی با جمعیت هدف کوچک بسیار مشکل است.» اما او احساس تعهد کرد و تلاش کرد تا این فناوری را وارد بازار کند.
در سال ۲۰۱۲ بلر لاک و سه پژوهشگر دیگر، شرکت Coapt را تاسیس کردند و با تولیدکنندگان اندامهای مصنوعی برای فروش محصول خود قرارداد بستند.
در ماه مارس، شرکت Coapt، حق انحصاری الکترودهای کاشتنی بنیاد تحقیقات پردو (Purdue) را گرفت. الکترودهای کاشتنی سیگنالهای الکتریکی ماهیچهها را با وضوح بشتری نسبت به الکترودهای سطحی روی پوست دریافت میکنند. هماکنون شرکت مهندسی Coapt با پنج تولیدکننده اندامهای مصنوعی همکاری میکند: Motion Control، Touch Bionics، Steeper، Ottobock و College Park Technology.
افراد زیادی مانند جودی دست خود را در اثر حادثه از دست دادهاند. گلن لیمن (Glen Lehman) در سال ۲۰۰۸ در یک ماموریت نظامی در عراق حضور داشت و یک نارنجک به نزدیکی تانک او برخورد کرد. در اثر این اتفاق دست راست خود را از دست میدهد و هم چنین توده عضلانی ران پا نیز آسیب میبیند. او نزدیک به شش هفته تلاش کرد که روش استفاده از دست مصنوعی مایوالکتریک را یاد بگیرد. لیمن یکی از داوطلبان سامانه استاندارد مایوالکتریک بود که این پروتز نسخه درمانگاهی را امتحان کرد و پس از آن پیشنهاد داد که پروتز نسخه شخصی نیز ساخته شود.
گلن لیمن از کاربران علاقهمند به دست مصنوعی Coapt است و این شرکت را مشتاقانه حمایت میکند. او تاکنون همراه با شرکت Coapt دو مرتبه در انجمن ارتز و پروتز آمریکا شرکت کرده است. لیمن میگوید: «پانزده درصد از دویست نفری که دست مصنوعی Coapt را استفاده میکنند کهنه سربازان هستند.»
هماکنون شرکت Coapt در حال تحقیق و توسعه راههای بهبود سامانه دست مصنوعی است. پژوهشگران شرکت بر الگوریتمی تمرکز دارند تا بتوان الگوهای حرکتی را به صورت همزمان شناسایی کند به این معنی که باز کردن کف دست و چرخاندن مچ همزمان انجام گیرد. آنها همچنین تصمیم دارند در آینده برای افراد قطع عضو پا نیز چنین پروتزی بسازند. گلن لیمن بیان میکند که فناوری Coapt به مراتب جلوتر از بازار است. او خاطر نشان میکند: «Coapt فناوری آینده نیست بلکه فناوری موجود در بازار ۲۰ سال عقبافتاده است.»
قیمت دست مصنوعی دارای فناوری Coapt بسته به تولیدکننده اندامهای مصنوعی و بیمهکنندگان متغیر است ولی به هرحال قیمت این پروتز زیاد است. لیمن معتقد است که پروتز Coapt با این قیمت میارزد و هیچ کس نمیتواند بر کیفیت زندگی او قیمت بگذارد.
منبع: Massdevice


