Ashish Deshpande و گروهی از دانشجویان تحصیلات تکمیلی آزمایشگاه ReNeu (مخفف Rehabilitation and Neuro Muscular Robotic Lab) یک ربات اسکلت خارجی به نام HARMONY طراحی کردهاند که قادر به توانبخشی بخش بالاتنه به وسیلۀ اعمال حرکتهای طبیعی و فشار و نیروی قابل تنظیم است. این ویژگی باعث میشود تا ربات از نظر بیماران بی وزن به نظر برسد. نرمافزار HARMONY به توانبخشان و پزشکان امکان توانبخشی دقیق و دنبال کردن و تحلیل دادهها را میدهد.
پژوهشگران بر این باورند که HARMONY برای کمک به بازتوانی فیزیکی و حرکتی بیماران پس از آسیب دیدگی مؤثر است و به بازگرداندن توانایی انجام کارهای روزمره مانند غذا خوردن و پوشیدن لباس کمک میکند.
دکتر Deshpande استادیار دانشکدۀ مهندسی مکانیک میگوید: «ربات HARMONY ثمرۀ سالها تحقیق و توسعه در آزمایشگاه رباتیک ReNeu است. این ربات به طور ویژه برای انجام حرکات توانبخشی دلخواه و با بیشترین تأثیر طراحی شده است. این ربات علاوه برا اینکه میتواند با توجه به اندازۀ بدن بیمار تنظیم شود، میتواند با توجه به نیازهای توانبخشی به گونهای تنظیم شود که حرکاتی نرم یا سخت داشته باشد.»
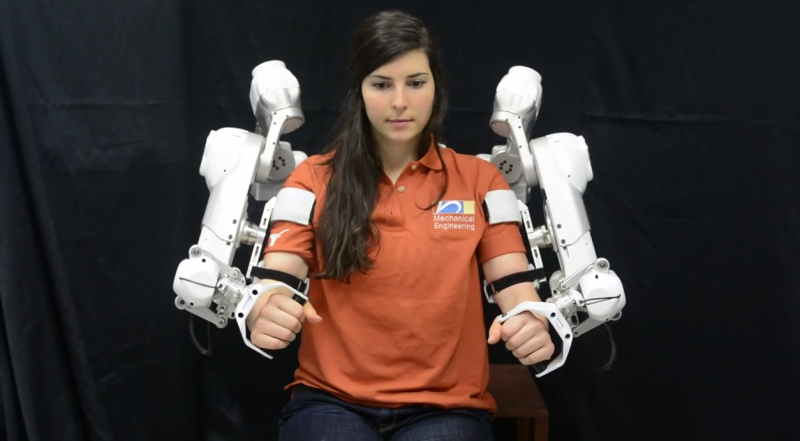
طراحی HARMONY با تمام بخشهای بالاتنه سازگار است و این ویژگی، آن را از فناوریهایی که تنها بر روی یک بازو تمرکز دارند و قابلیتهای توانبخشی همزمان هر دو دست را نادیده میگیرند متمایز میسازد. این ربات از سه بخش از هر سمت از بالاتنۀ بیمار به وی متصل میشود و امکان حرکت در ۱۴ محور را برای رسیدن به حرکات نرم و طبیعی در اختیار میگذارد. گروه تحقیقاتی دانشگاه تگزاس در Austin نخستین نمونههای اولیۀ HARMONY را در سال ۲۰۱۱ ساختند. سپس در سال ۲۰۱۳ برای انتخاب سختافزار و ساخت ربات با Meka Robotics وارد همکاری شدند.
این ربات به حسگرهایی مجهز شده است که قادرند ۲۰۰۰ بار در ثانیه داده جمع آوری کنند. این دادهها در اختیار برنامۀ ربات قرار میگیرند تا ربات با توجه به آن واکنش ویژه ای را از خود نشان دهد. پژوهشگران دانشکدۀ Cockrell به کمک اطلاعاتی که از فیزیوتراپیستها و پزشکان دریافت کردند توانستند مکانیزمی برای حرکت کتف ربات HARMONY طراحی کنند تا به طبیعی شدن حرکات به ویژه ریتم scapulohumeral (یک حرکت دورانی لازم برای حرکات بالاتنه و پایداری بلند مدت مفاصل) کمک کند.
این پژوهشگران معتقدند که HARMONY میتواند زمان بازتوانی بیمار را کاهش دهد زیرا ربات میتواند خود را با شیوههای ویژه و تصحیح شونده ای که انسان با آن میآموزد تطبیق دهد. قابلیت بالای کنترل نیرو و گشتاور به ربات امکان میدهد تا حرکات نامناسب کاربر را هنگام انجام تمرینها به آرامی تصحیح کند. علاوه بر این HARMONY را میتوان طوری برنامهریزی کرد که به تدریج بر سختی تمرینها بیافزاید. فیزیوتراپیستها میتوانند از دادههای جمع آوری شده توسط ربات هنگام تمرین بیماران برای مشاهدۀ میزان پیشرفت آنها و در نظر گرفتن تمرینهای مناسب استفاده کنند.
نشان داده شده است که رباتهای توانبخشی اسکلت خارجی بالاتنه برای بازتوانی نیرو و مهارتهای حرکتی پس از آسیب دیدگی مفیدند. اما متخصصان دربارۀ توانایی رباتهای اسکلت بیرونی برای کمک به بیماران به منظور رسیدن به شرایط لازم برای انجام فعالیتهای روزانه تردید دارند. مکانیزم کتف ربات HARMONY قابلیت انجام بازۀ وسیعی از حرکتها را دارد که بسیار شبیه به حرکتها و فعالیتهای روزمره است. افزودن یک صفحه نمایش یا محیط بازی برای شبیه سازی این فعالیتها میتواند به بازآموزی موفق این حرکتها بیانجامد.
با کامل شدن HARMONY پژوهشگران در حال توسعۀ نرمافزار آن هستند تا ربات را برای یک دورۀ آزمایشی در تابستان امسال آماده کنند. این پژوهش بر روی ۲۰ تا ۳۰ نفر از افراد سالم و در دانشگاه تگزاس در Austin انجام خواهد شد. پژوهشگران قصد دارند تا تحقیقات خود را بر روی بیماران آسیب دیده از ضربه و ستون فقرات ادامه داده و نتایج آن را با میزان تأثیر بازتوانیهای عادی مقایسه کنند.
منبع: phys.org


