رباتهای پوشیدنی به افراد مسن کمک میکنند تا تحرک خود را حفظ کنند. همچنین به بیماران پاراپلژیک کمک میکنند توانایی خود را دوباره به دست آورند. این رباتها به قویتر و سریعتر شدن انسان کمک میکنند. اما، تاکنون در جلوگیری از سقوط افراد و حفظ تعادل عالی نبودند.
تعادل انسان یک حرکت پیچیده است و حتی پیشرفتهترین رباتها و ابزارهای پوشیدنی مانند اسکلتهای بیرونی رباتیک در تکرار شیوه کار مغز و بدن ما برای ایستادن مشکل دارند. یک مطالعه جدید توسط پژوهشگران مؤسسه فناوری جورجیا و دانشگاه اموری نخستین گام را به سمت حل مشکل حفظ تعادل برداشتهاند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
در مقالهای که در 15 فوریه در Science Robotics منتشر شد، پژوهشگران نشان دادند اسکلت بیرونی مچ پا باید سریعتر از بدن ما برای بهبود تعادل واکنش نشان دهد. وقتی اسکلت بیرونی اعمال قدرت را به تأخیر انداخت و عضلات پا و مچ پا برای بازگرداندن تعادل فعال شدند، شرکتکنندگان هیچ بهبودی در حفظ تعادل از اسکلت بیرونی دریافت نکردند.
Max Shepherd، یکی از همکاران فوق دکتری در جورجیاتک در طول این مطالعه و استادیار دانشگاه نورث ایسترن، میگوید: «تعجب آور بود که استفاده از کمکهای فیزیولوژیکی با تأخیر از اسکلتهای بیرونی به هیچ وجه کمکی نکرد. نتایج شگفت انگیز بود. فکر میکنم این یک نتیجه بسیار جذاب است».
روش مطالعه
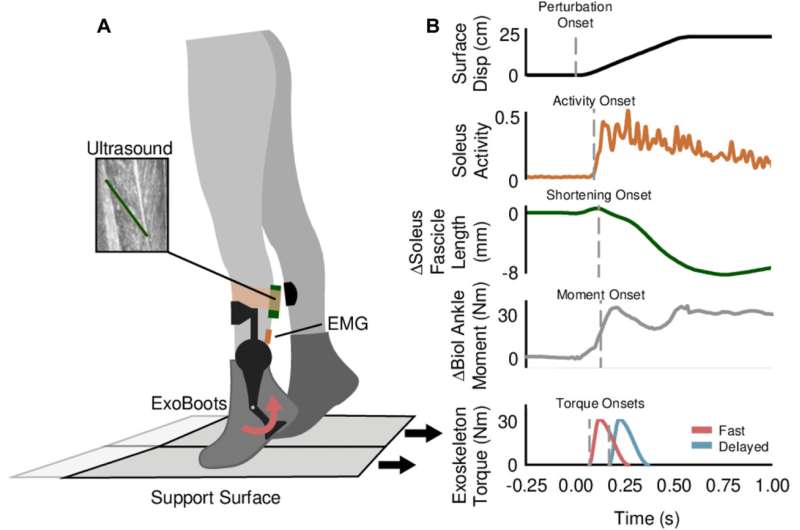
این گروه برای این مطالعه از یک جفت چکمه اسکلت بیرونی مچ پا که به صورت تجاری در دسترس است – از شرکت Dephy – استفاده کرد. شرکت کنندگان چکمهها را پوشیدند و روی یک بستر سفارشی در آزمایشگاه نورومکانیک Lena Ting در دانشگاه اموری ایستادند.
پژوهشگران بستر را به طور ناگهانی جابجا کردند؛ چیزی که آنها اغتشاش مینامند. این موجب شد سوژهها تعادل خود را از دست بدهند و سعی کنند دوباره تعادل خود را حفظ کنند. آنها سه شرایط را آزمایش کردند: عدم کمک اسکلت بیرونی، کمک با تأخیر تا واکنش طبیعی بدن و کمک سریعتر از پاسخ فیزیولوژیکی. آنها گزارش دادند ارائه گشتاور اسکلت بیرونی مچ پا پیش از پاسخ طبیعی بدن، کاربران را قادر میسازد تا 9 درصد آشفتگیهای بزرگتر را بدون برداشتن قدمی تحمل کنند. تأخیر در گشتاور هیچ بهبودی را نشان نداد.
Ting، پژوهشگر و استاد جورجیاتک و دانشگاه اموری، میگوید: «بسیاری از پروتزها یا اسکلتهای بیرونی توسط سیگنالهای فیزیولوژیکی دریافت شده از انسان، اعم از فعالیت ماهیچهای یا فعالیت مغزی، هدایت میشوند. شما عضله اطراف مچ پا را اندازه میگیرید و هر زمان که سیگنالی از عضله دریافت شد، ربات را فعال میکنید. نکته اینجا است که این برای حفظ تعادل کارساز نیست».
عدم توانایی در پیگیری واکنشهای بدن برای فعالسازی اسکلت بیرونی، ساخت دستگاهی را که بتواند به افراد کمک کند تعادل خود را در موقعیتهای واقعی بازیابی کنند، دشوارتر میکند. اما همچنین راههای هیجانانگیزی را برای پژوهشگران ارائه میکند، از جمله استفاده از رویکردهای یادگیری ماشین برای شناسایی و پاسخ به اختلالات.
نتایج
تنها 150 میلی ثانیه طول میکشد تا بدن به از دست دادن تعادل واکنش نشان دهد. بنابراین اسکلت بیرونی مچ پا پنجره بسیار کوچکی برای فعال شدن دارد. این گروه در آزمایشهای خود، از شتابسنجهایی مشابه آنچه در گوشیهای هوشمند یافت میشود برای ردیابی شتاب پا در هنگام آشفتگی و فعالسازی اسکلت بیرونی استفاده کردند.
یک کنترلر هوشمندتر با نوعی یادگیری ماشینی در نهایت میتواند امیدوار کننده باشد. اما جالب است که دادهها برای تغذیه این الگوریتمها احتمالاً باید از خیلی فراتر از عضلات مچ پا به دست آیند.
پژوهشگران گزارش دادند کمک مصنوعی سریع از اسکلت بیرونی حرکت اولیه مچ پا را مختل میکند. در واقع، سیگنال موضعی در مچ پا موجب میشود اسکلت بیرونی گشتاور را در جهت اشتباه ایجاد کند که بیثباتکنندهتر خواهد بود.
این گروه از این ایده حمایت میکند که ماهیچهها نه تنها توسط اطلاعات حسی محلی در مچ پا، بلکه توسط اطلاعات از سراسر بدن هدایت میشوند.
مطالعاتی که به حدود 50 سال پیش برمیگردد نشان دادند سیگنالهای فیزیولوژیکی کلی در پیشبینی رفتار اصلاح کننده تعادل بدن بهتر از اطلاعات محلی تنها از مچ پا و ساق پا هستند.
Ting میگوید: «ایده این است که مرکز ثقل، که حرکت خالص کل بدن است، کاری را که ماهیچه مچ پا باید انجام دهد، هدایت میکند. چیزی که من در مورد یافتههایمان دوست دارم این است که آنها این داستان دهه 1970 را تأیید میکنند. و آن را بسیار واضح و کاربردی نشان میدهند».
سخن آخر
Shepherd گفت: «ما توانستیم یک سؤال بسیار ویژه در مورد تعامل میان اسکلت بیرونی و انسان بپرسیم. و کمی بیشتر در مورد اینکه چگونه اسکلت بیرونی به پاسخ های فیزیولوژیکی انسان کمک یا آنها را مختل میکند. این مطالعه راهی بسیار واضح برای ارائه بینشی در مورد بهبود تعادل است که میتواند به یک زمینه بسیار بزرگ در اسکلتهای بیرونی تبدیل شود».
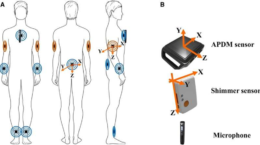
این گروه برای تکمیل درک خود، از فناوری ضبط حرکت و الکترومیوگرافی (EMG)و حسگرهای اولتراسوند استفاده کردند. تا بتوانند با جزئیات نه تنها شیوه کار مچ پا و اسکلت بیرونی را با هم – یا در برابر یکدیگر – بلکه عضلات فعال شده و شدت آنها را بررسی کنند.
>> توسعه پروتزهای رباتیک برای کمک به حفظ تعادل حین راه رفتن
>> مسیری ساده و ارزان برای ساخت اسکلت های بیرونی با قابلیت حفظ تعادل
منبع: techxplore.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»