توانبخشی، فرآیند درمان پیامدهای پس از سکته مغزی است. اندامهای آسیب دیده به عنوان پیامدهای رایج سکته مغزی در نظر گرفته میشوند که نیاز به یک درمانگر حرفهای برای توانبخشی و بازیابی کامل یا جزئی عملکرد دارند. با توجه به کمبود تعداد درمانگر و سایر ملاحظات، پژوهشگران بر روی توسعه رباتهایی کار میکنند که توانایی انجام فرآیند توانبخشی را داشته باشند. در طول دو دهه گذشته، رباتهای مختلفی برای کمک به توانبخشی اختراع شدند. در ادامه با انواع درمانهای توانبخشی و طبقهبندی رباتها آشنا میشویم. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
سکته مغزی
سکته مغزی یکی از علل اصلی مرگ در نظر گرفته میشود که پس از بیماریهای قلبی و سرطان در جایگاه سوم قرار دارد. گزارش شده است که تا ۳۰ درصد از بیماران سکته مغزی از ناتوانیهای دائمی رنج میبرند و تا ۲۰ درصد به برنامههای توانبخشی فشرده نیاز دارند. بیماران سکته مغزی سه مرحله را میگذرانند که به طور مستقیم پس از سکته آغاز میشود: نخست، مرحله حاد که به مدت یک هفته ادامه مییابد. دوم مرحله تحت حاد که شش ماه طول میکشد و به دنبال آن مرحله سوم که مرحله مزمن است.
عواقب سکته مغزی را میتوان با توانبخشی، درمان یا کاهش داد. توانبخشی نیازمند یک درمانگر حرفهای برای انجام حرکات تکراری اندام آسیب دیده است. با این حال، در دسترس بودن درمانگر، مدت جلسه درمانی و هزینهی ابزار توانبخشی همگی به عنوان عواملی در نظر گرفته میشوند که هم بر درمانگر و هم بر بیماران تأثیر میگذارند. افزون بر این، برنامههای توانبخشی نیاز به تعامل میان درمانگر و بیمار دارد. توانبخشی تعاملی هم برای درمانگر و هم برای بیمار زمانبر و پر زحمت است. این حقایق پژوهشگران را وادار به اختراع رباتهای توانبخشی کرد که میتوانند به عنوان ابزار کمکی برای درمانگران استفاده شوند. رباتهای توانبخشی افزون بر توانایی خود در ارائه حرکات مکرر برای اندام بیمار، توانبخشی فشرده، دقیق و ایمن را نیز ارائه میدهند.
درمان های توانبخشی
هنگامی که کنترل حرکتی اندام به خطر بیفتد، درمانگر باید به دنبال روش بهینه برای درمان اندام آسیب دیده باشد. انتخاب روش درمانی مناسب یک تصمیم حیاتی است که در نهایت بر کارایی درمان تأثیر میگذارد. سه نوع ربات درمانی وجود دارد که به شرح زیر است:
۱- درمان غیرفعال
درمان غیرفعال به هیچ تلاشی از جانب بیمار نیاز ندارد و به طور معمول در مراحل اولیه پس از سکته مغزی استفاده می شود، به ویژه زمانی که هیچ پاسخی از اندام آسیب دیده دریافت نشود. درمان غیرفعال معمولاً برای بیماران همیپلژی تجویز میشود که از فلج یک طرفه رنج میبرند. این روش شامل حرکت دادن اندام آسیب دیده در یک مسیر مشخص برای چند بار در طول یک جلسه است که توسط یک ربات توانبخشی انجام میشود. مسیر حرکت با دقت از پیش برنامهریزی شده است تا از هرگونه آسیب اجتناب شود.
این نوع درمان بر کشش و انقباض اندام فوقانی آسیب دیده تمرکز دارد. همچنین برای ارزیابی دامنه حرکتی اندام استفاده میشود. رباتهای اسکلت بیرونی در این درمان برای ارائه حرکات تکراری با توجه به دامنه حرکت استفاده میشوند. درمان غیرفعال اثربخشی خود را در کاهش اسپاسم و سفتی اندامهای آسیب دیده نشان داده است.
۲- درمان فعال
این نوع درمان برای بیمارانی تجویز میشود که میتوانند اندام آسیب دیده خود را تا حدی حرکت دهند. اصطلاح فعال به توانایی حرکت اندام آسیب دیده اشاره دارد اما نه به طور مؤثر. درمان فعال را میتوان به عنوان درمان کمکی فعال یا درمان مقاومتی فعال طبقهبندی کرد. درمان کمکی فعال شامل اعمال نیروی خارجی توسط یک درمانگر یا ربات برای کمک به بیمار برای انجام وظیفه تعیین شده است. همچنین برای بهبود دامنه حرکتی استفاده میشود.
درمان مقاومتی فعال، شامل اعمال نیروی مخالف بر روی اندامهای آسیب دیده است. نیروی مخالف میتواند توسط یک درمانگر یا ربات اعمال شود. میزان نیروی مخالف توسط یک الگوریتم با توجه به توانایی بیمار تعیین میشود.
۳- درمان دوطرفه
درمان دوطرفه به اصل آینه درمانی در انجام توانبخشی اشاره دارد. جایی که اندام آسیب دیده حرکت اندام سالم و عملکردی را دنبال میکند. این به کاربر کنترل کامل اندام آسیب دیده را میدهد. درمان دوطرفه بهبود قابل توجهی در عملکردهای حرکتی و نیمکره مختل شده دارد.
رباتهای توانبخشی و طبقهبندی آنها
سالانه حدود ۱۵ میلیون نفر از سکته مغزی رنج میبرند. حدود شش میلیون نفر از آنها دچار نوعی ناتوانی میشوند. این ناتوانیها از اندامهای کاملاً فلج تا ضعیف متفاوت است.
دانشمندان دریافتهاند که فعالیتهای خاص مغز میتواند به مکان دیگری در مغز منتقل شود و این به عنوان نوروپلاستیسیته شناخته میشود. حرکات تکراری اندامهای آسیب دیده به مغز اجازه میدهد تا مسیرهای عصبی جدیدی را توسعه دهد و در نهایت کنترل کامل یا جزئی عملکردهای حرکتی را بازیابی کند.
استفاده از یک ربات توانبخشی میتواند با ارائه یک تمرین تکراری برای عملکردهای آسیبدیده، موجب ایجاد نوروپلاستیسیته شود. اهمیت استفاده از ربات توانبخشی ناشی از توانایی آن در ارائه نظارت کمی و مستمر بر عملکرد بیمار در طول آموزش است که به ما امکان میدهد بهبودی را بررسی کنیم.
ربات های توانبخشی بر اساس رویکردهای درمانی یا ساختارشان طبقهبندی میشوند:
۱-با توجه به رویکرد درمانی
رباتهای توانبخشی را میتوان با توجه به رویکردهای درمانی به دو نوع طبقهبندی کرد. نخستین رویکرد حرکت غیرفعال پیوسته (CPM) است. CPM به هیچ تلاش داوطلبانهای نیاز ندارد که توسط بیمار انجام شود، درواقع اندام توسط ربات کنترل و حرکت میکند. درمان CPM موجب کاهش تون عضلانی میشود که در نهایت موجب بهبود تحرک عضلات، مفاصل و تاندونها میشود.
روش دوم، حرکت با کمک فعال است که در آن ربات برای انجام حرکت به سیگنالی از بیمار نیاز دارد. این سیگنال میتواند یک الکترومیوگرام (EMG یا سیگنال الکتریکی عضلات) باشد. درواقع ربات از قصد بیمار برای حرکت دادن اندام پیروی میکند. رباتهای توانبخشی با کمک فعال نیازمند تلاش داوطلبانه بیمار هستند و در نتیجه در مقایسه با توانبخشی CPM، بهبود حرکتی قابل توجهی را ارائه میدهند. بنابراین، بیشتر پژوهشگران فعلی بر توانبخشی با کمک فعال با استفاده از رباتها تمرکز میکنند.
۲- با توجه به ساختار ربات
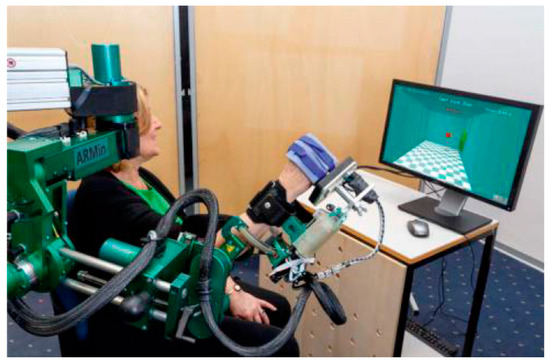
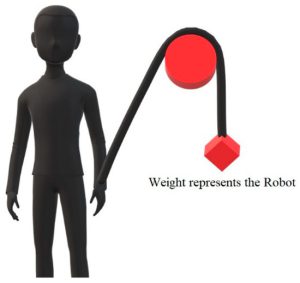
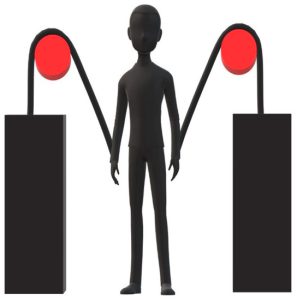
رباتهای توانبخشی به عنوان رباتهای عملگر نهایی (end-effectors) و اسکلت بیرونی طبقهبندی میشوند. عملگرهای نهایی رباتهای سادهای هستند که دارای یک دسته متحرک دیستال هستند و بیمار دست خود را به این دسته وصل و یک مسیر مشخص را دنبال میکند. مشخصه این نوع ربات توانایی آن در سازگاری با اندازهها و شکلهای مختلف حرکات است، همانطور که فرآیند توانبخشی نیاز دارد. رباتهای عملگر نهایی این مضرات را دارند که حرکت چرخشی را ارائه نمیدهند، که موجب میشود برای حرکات پرونیشن و سوپینیشن مناسب نباشند. عملگرهای نهایی اخیراً برای ارائه آموزش توانبخشی دوطرفه ایجاد شدهاند که در آن اندام آسیبدیده از حرکت اندام سالم در یک رفتار هماهنگ کپی میکند. برخی از پژوهشگران گزارش کردهاند توانبخشی دو طرفه دارای ویژگی فعال کردن نیمکره آسیب دیده با قرار دادن سمت چپ و سمت راست بدن در یک مسیر است.
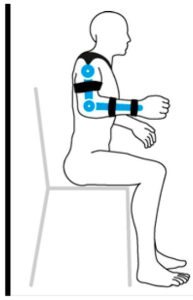
رباتهای اسکلت بیرونی با محصور کردن اندام با یک آتل یا ساختار بیونیک، مشخص میشوند. رباتهای اسکلت بیرونی گشتاور مورد نیاز هر مفصل را محاسبه کرده و حرکات اندام را کنترل میکنند. در مقایسه با رباتهای عملگر نهایی، اسکلتهای بیرونی به محیط کاری کوچکتری نیاز دارند. رباتهای اسکلت بیرونی، محورهای مفصلی اندام را تشکیل و حرکت بسیار خاصی را ارائه میکنند. افزون بر این، استفاده از رباتهای اسکلت بیرونی برای توانبخشی دوطرفه امکانپذیر نیستند، زیرا از اسکلت بیرونی اندام راست نمیتوان برای اندام چپ استفاده کرد و در نهایت، طراحی رباتهای اسکلت بیرونی راست و چپ برای انجام آموزشهای توانبخشی دوطرفه گران است.
>> تغییر توانبخشی فیزیکی با هوش مصنوعی: ۴ عامل موفقیت
منبع: doi.org/10.3390/app10196976
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


