اسکلتهای بیرونی رباتهایی هستند که از نزدیک با انسانها تعامل دارند و برای مقاصد مختلف مانند توانبخشی، کمک به فعالیتهای زندگی روزمره (ADL)، تقویت عملکرد یا به عنوان ابزار لمسی استفاده میشوند. در چند دهه اخیر، فعالیتهای پژوهشی روی این رباتها به طور تصاعدی رشد کرده است و حسگرها و فناوریهای فعالسازی دو موضوع پژوهشی اساسی برای توسعه اسکلتهای بیرونی هستند. برای آشنایی بیشتر با این دو موضوع با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
هدف اسکلت بیرونی
تعامل انسان و اسکلت بیرونی رباتیک میتواند اهداف مختلفی داشته باشد. در این زمینه چهار دسته اصلی را میتوان شناسایی کرد: توانبخشی، کمک، تقویت عملکرد و تعامل لمسی. توانبخشی رباتیک تمرینهای تکراری، منعطف و قابل تنظیم را فراهم میکند تا کار فیزیوتراپیست را تکمیل کند. استفاده از دستگاههای رباتیک در توانبخشی مزایای مهم دیگری نیز دارد، از جمله، انجام حرکات تکراری، انجام توانبخشی در منزل با کنترل از راه دور، تنظیم خودکار پشتیبانی دستگاه بر اساس بهبودی بیمار، افزایش مشارکت بیمار از طریق بازیهای رایانهای، نظارت بر پیشرفت از طریق ارزیابی نتایج به روشی عینی و کاهش هزینه کلی مراقبتهای توانبخشی.
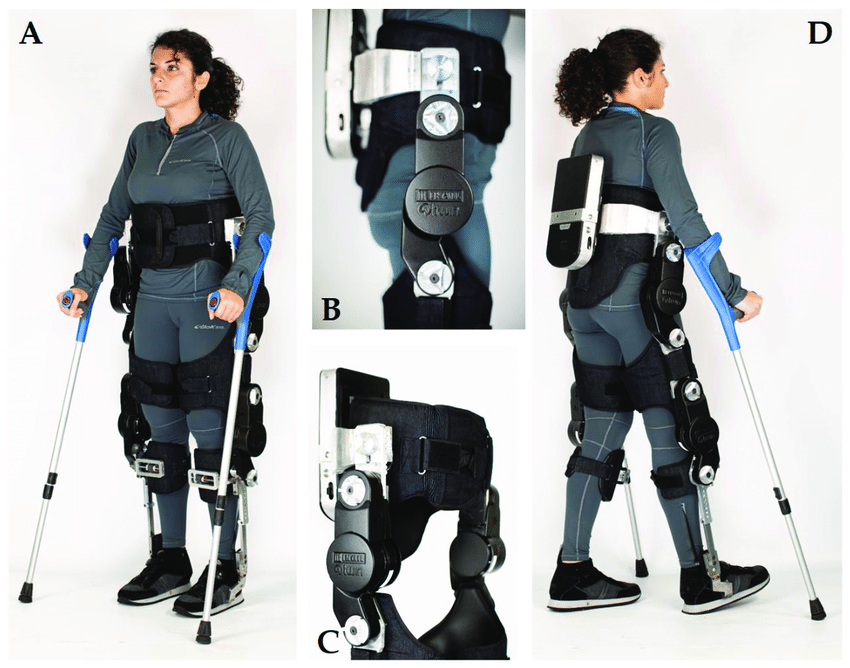
اسکلتهای بیرونی رباتیک کمکی میتوانند به طور مؤثر برای کمک به افراد مسن یا افراد آسیب دیده در انجام مهمترین فعالیتهای زندگی روزمره با استقلال بیشتر، تلاش برای جبران ناتوانیها یا از دست دادن جزئی عملکرد، مورد استفاده قرار گیرند. راه رفتن، گرفتن و دست زدن به اشیا و غذا خوردن برخی از این فعالیتهای اصلی هستند.
در زمینه وظایف کاری یا نظامی، که شامل فشارهای بسیار شدید به ساختارهای اسکلتی و عضلانی انسان است، استفاده از ربات اسکلتی بیرونی میتواند منجر به بهبود قابل توجه در شرایط عملیاتی و کاهش خطر آسیبهای فیزیکی مرتبط با این نوع وظایف شود. اسکلتهای بیرونی که به طور خاص برای تقویت عملکرد طراحی شدهاند، قدرت یک ربات را با هوش انسان برای انجام کارهایی ترکیب میکنند که به سختی توسط یک انسان به تنهایی یا یک ربات به تنهایی انجام میشود. افزون بر این، رابطهای لمسی در نظر گرفته شده برای کاربردهای واقعیت افزوده یا واقعیت مجازی را میتوان از طریق اسکلت بیرونی پوشیدنی توسعه داد. هدف اصلی این دسته اسکلتهای بیرونی ارائه سیگنالهای بازخوردی است. اسکلتهای بیرونی که بهعنوان ابزار اندازهگیری یا رابط لمسی شناخته میشوند، نمونههایی از این نوع سامانهها هستند.
معماری کلی یک اسکلت بیرونی
اسکلت بیرونی رباتیک مانند هر ربات دیگری، سامانه پیچیدهای از قطعات مرتبط با یکدیگر است. همانطور که بلوک دیاگرام زیر نشان میدهد، مجموعه عناصر اساسی زیر را می توان به طور معمول شناسایی کرد:
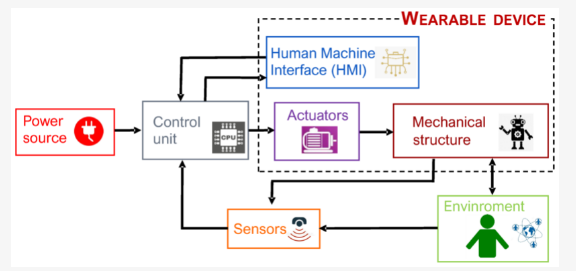
عملگرها و حسگرها عناصر اساسی اسکلتهای بیرونی هستند. عملگرها عناصر کلیدی در دستگاههای فعال هستند و به طور قابل توجهی بر عملکرد دستگاه تأثیر میگذارند. حسگرها برای تعامل با محیط، به ویژه با کاربر اسکلت بیرونی ضروری هستند.
محیط، هدف و شرایط کاری به شدت بر الزاماتی که انتظار میرود یک دستگاه انجام دهد تأثیر میگذارند. برای نمونه، الزامات اصلی رباتهای صنعتی سنتی دقت و سرعت بالا است. اما یک اسکلت بیرونی پوشیدنی در یک محیط بدون ساختار عمل میکند و باید به عنوان ویژگیهای اصلی ایمنی، راحتی کاربر، کنترل آسان و بار کم را تضمین کند. این مشخصات به طور قابلتوجهی بر انتخاب اجزای سامانه و فناوریهای مرتبط تأثیر میگذارد.
یکی دیگر از انتخابهای طراحی که بر بسیاری از جنبههای اساسی مانند ساختار، وزن، مصرف انرژی و عملکرد تأثیر میگذارد، مربوط به فناوری تولید توان مکانیکی است. طیف گستردهای از عملگرها برای توسعه دستگاههای رباتیک اسکلت بیرونی استفاده شدهاند. اینها را میتوان بر اساس ماهیت منبع انرژی مورد استفاده برای تولید نیروی مکانیکی طبقهبندی کرد: عملگرهای هیدرولیکی، پنوماتیکی و الکتریکی رایجترین هستند. جنبههای مربوط به انتقال حرکت نیز ارتباط نزدیکی با روش تحریک انتخابی دارند.
به طور مشابه، فناوریهای مختلفی برای اهداف سنجش در اسکلتهای بیرونی استفاده میشوند، مانند اقدامات مربوط به حرکت اندامهای خاص، نیروها یا گشتاورهای مبادله شده بین دستگاه و کاربر، سیگنالهای زیستی مانند سیگنالهای الکترومیوگرافی (EMG)، سیگنالهای الکتروانسفالوگرافی (EEG) و سیگنالهای مکانومیوگرافی (MMG) برای کنترل یا اعتبارسنجی دستگاه.
عملگرها
اصطلاح عملگر به زیرسیستمی اطلاق میشود که توان مکانیکی را تولید میکند. بنابراین، شامل منبع تغذیه، نوع عملگر و راهکارهای انتقال است. عملگرهای اسکلت بیرونی باید مشابه عضلات بیولوژیکی و کنترل عصبی-مکانیکی آنها عمل کنند، مانند همه رباتهایی که با انسان تعامل دارند.
عملگر الکتریکی
راهکار الکتریکی برای فعالسازی به طور گستردهای مورد استفاده قرار میگیرد زیرا امکان ذخیره و تأمین آسان انرژی را فراهم میکند. عملگرهای الکتریکی در انواع و اندازههای بسیار متنوع موجود هستند، قابل اعتماد هستند و دقت کنترل خوبی را امکانپذیر میکنند.
در بین انواع مختلف، موتورهای الکتریکی DC جاروبکدار بیشترین استفاده را دارند و پس از آن موتورهای DC بدون جاروبک قرار دارند. موتور DC جاروبکدار در بسیاری از موارد به دلیل ساختار ساده موتور و درایو الکترونیکی آن استفاده میشود. با این حال، جاروبکها و سامانه کموتاتور نیاز به تعمیر و نگهداری منظم دارند.
بنابراین، مزایای اصلی موتورهای بدون جاروبک نسبت به موتورهای جاروبکدار، قابلیت اطمینان بیشتر، به دلیل کمبود جاروبک و عملکرد دینامیکی بهتر است، که اینرسی کمتر روتور و نسبت توان به وزن بالاتر را ممکن میسازد. انتخاب صحیح عملگرها و اندازهگیری آنها یک مرحله کلیدی در طراحی اسکلت بیرونی برای به دست آوردن سامانههای سبک و شفاف است.
انتقال حرکت
تجزیه و تحلیل انتقالهای مکانیکی اسکلت بیرونی نشان میدهد که کابلها بهترین راهکار هستند. استفاده از سیستم انتقال کابلی منجر به کاهش قابل توجه وزن اسکلت بیرونی و گشتاور مورد نیاز در سطح مفصل میشود. اسکلتهای بیرونی کابل محور در دسته اسکلتهای بیرونی به اصطلاح انعطافپذیر قرار میگیرند که تعامل طبیعیتر انسان و ماشین را بوجود میآورند. در حال حاضر برای اسکلتهای بیرونی، کابلهای Bowden رایجتر هستند. اصل کار کابلهای Bowden انتقال گشتاور موتور به اتصالات از طریق کابلها و قرقرهها است. با استفاده از انتقال کابل Bowden، موتور و گیربکس در پشت کاربر قرار میگیرند تا توزیع جرم را بهبود بخشند.
عملگر هیدرولیک و الکتروهیدرولیک
مزایای اصلی عملگر هیدرولیک سازگاری ذاتی آن و اینرسی کم اتصال است، در حالی که معایب اصلی مربوط به غیرقابل حمل بودن و دشوار بودن دستکاری اسکلتهای بیرونی و همچنین خطر نشت مایع هیدرولیک است.
عملگر الکترو هیدرولیک دارای مزایای هیدرولیکی و الکتریکی است. این نوع راهکار سطح بالایی از قدرت را فراهم میکند.
عملگر پنوماتیکی
عملگرهای پنوماتیکی دارای انطباق ذاتی و نسبت توان به وزن بالا هستند، اما نیروها و مقادیر گشتاور محدودی دارند؛ ویژگیهایی که آنها را برای فعال کردن اسکلت بیرونی در مواقعی که نیروها یا گشتاورهای بالا مورد نیاز نیستند، مناسب میسازد. عضلات مصنوعی پنوماتیک (PAM) پرکاربردترین محرک پنوماتیک در اسکلت های بیرونی است.
در مقایسه با موتورهای الکتریکی، PAMها دارای چندین مزیت هستند، انطباق ذاتی، هزینه کم، نسبت قدرت به وزن بالا و فشردگی.
حسگرها
حسگرها یک عنصر ضروری در اسکلت بیرونی هستند، زیرا امکان تشخیص اطلاعات از محیطی که ربات با آن در تعامل است را فراهم میکند. این دادههای جمع آوری شده برای کنترل اسکلت بیرونی ضروری هستند. انواع مختلفی از اطلاعات ممکن است بسته به جنبههای مختلف، مانند نوع اسکلت بیرونی، نوع کنترل و شیوه عملکرد ضروری باشد. در نتیجه، انواع مختلفی از حسگرها مانند نیرو، گشتاور، فشار، EMG، EEG و حسگرهای خمشی، IMU، دوربینها و انکودر برای اندازهگیری مقادیر فیزیکی مانند موقعیتها، جابهجاییها، چرخشها، نیروها، گشتاورها، شتابها و ماهیچهها قابل استفاده هستند.
حسگرهای خمشی
حسگرهای خمشی برای اندازهگیری ویژگیهای یک عنصر منحرف شده از یک موقعیت طبیعی استفاده میشوند. هدف اصلی حسگرهای خمشی تشخیص میزان و جهت نیروی خمشی تولید شده توسط یک عنصر منحرف شده است. بنابراین، این حسگرها برای تعیین کمیت خمشی و بهطور غیرمستقیم برای اندازهگیری سایر کمیتهای فیزیکی، مانند فشار و تنش، در اسکلت بیرونی و در تعامل با محیط خارجی استفاده میشوند. این عناصر به ویژه در دستگاههای الکترونیکی و الکترومکانیکی پوشیدنی مانند اسکلتهای بیرونی فعال یا اندازهگیری مستقیم حرکت انسان بسیار جالب هستند، زیرا میتوانند در موقعیتهای مختلف نسبت به بدن انسان کار کنند و در برابر پیکربندیهای مختلف مقاوم هستند.
این حسگرها به دلیل انعطافپذیری برای استفاده در موقعیتها و زوایای مختلف بر روی اسکلت بیرونی بسیار امیدوارکننده هستند و میتوانند خمش مستقیم یا خمش ناشی از فشار جسم خارجی را اندازه بگیرند. آنها همچنین میتوانند ترکیبی از حرکات مفصلی را اندازه بگیرند، مانند حرکات انگشتان یک دستکش اسکلت بیرونی.
حسگرهای دینامیکی
حسگرهای دینامیکی که در اسکلتهای بیرونی استفاده میشوند را میتوان به چهار دسته اصلی تقسیم کرد: حسگرهای فشار، حسگرهای نیرو، حسگرهای گشتاور و IMU؛ بسته به کمیت فیزیکی که اندازهگیری میکنند. این حسگرها به ویژه برای اندازهگیری کنشهای متقابل بین اسکلت بیرونی و اندام انسان مناسب هستند. حسگرهای فشار در اسکلتهای بیرونی که از محرکهای سیال یا سایر بخشها مانند محرکهای نرم استفاده میکنند، بکار میرود.
حسگرهای نیرو امکان اندازهگیری مستقیم نیروی اعمال شده توسط کاربر در رابط را فراهم میکنند. حسگرهای نیرو نیز برای اعتبارسنجی دستگاهها یا برای تخمین عملکرد استفاده میشوند.
حسگرهای IMU منحصراً برای اسکلتهای بیرونی استفاده میشوند که برای کمک به فعالیتهای روزمره (LLE) توسعه یافتهاند. در واقع، یکی از وظایف اصلی آنها کمک به کار پیچیده مطالعه مراحل راه رفتن است.
حسگرهای الکترومیوگرافی (EMG)
الکترومیوگرافی (EMG) روشی برای ارزیابی و ثبت فعالیت الکتریکی عضلات است. هنگامی که سلولهای عضلانی از نظر الکتریکی یا عصبی برانگیخته میشوند، با این حسگرها پتانسیل الکتریکی ساطع شده از این سلولها را تشخیص میدهند. این سیگنالها را میتوان برای جستجوی ناهنجاریها، سطوح فعالسازی یا دستورات و همچنین مرتبط ساختن آن با سینماتیک حرکت تولید شده مورد مطالعه قرار داد. دو روش اصلی را میتوان اتخاذ کرد: EMG سوزنی، که در آن یک سوزن متصل به یک الکترود به داخل عضله وارد میشود، و EMG سطحی، که در آن یک الکترود به پوست در مجاورت عضله موردنظر متصل میشود.
در اسکلتهای بیرونی، این روش را میتوان برای فرمان دادن به دستگاه و برای ترکیب حرکات فرد و اسکلت بیرونی در رویکردی با کمک فعال یا ارزیابی ساده الگوی فعالسازی فرد در حین تحقق حرکت به کار برد.
حسگرهای الکتروانسفالوگرافی (EEG)
الکتروانسفالوگرافی (EEG) میدانهای الکتریکی روی سطح جمجمه را اندازه میگیرد. درواقع سیگنال EEG با فعالیت الکتریکی مغز ارتباط دارد. ضبط EEG بسته به سناریو در اشکال و اندازههای مختلفی وجود دارد.
میتوان از سیگنالهای EEG برای پیشبینی قصد حرکتی کاربر استفاده کرد. بنابراین یک رابط مغز و رایانه (BCI) را میتوان برای فرمان دادن به اسکلت بیرونی برای افراد سالم یا پاراپلژیک، استفاده کرد. همچنین EEG در ترکیب با روشهای دیگر، مانند EMG یا تحریک الکتریکی عملکردی (FES) کاربرد دارد.
سیگنال EEG میتواند بین افراد بسیار متفاوت باشد. این تفاوت در مواردی که سوژه دچار آسیبی است که بر عملکرد مغز تأثیر میگذارد، مانند سکته مغزی، بیماری پارکینسون، آسیب شدید مغزی اکتسابی و غیره بیشتر میشود. بنابراین، هرگونه استفاده از سیگنال EEG باید بسیار سفارشی شود.
دوربینها و سیستم دید اپتیکال
دوربینهای RGB، دوربینهای مادون قرمز، دوربینهای زاویه باز و دوربینهای سهبعدی، مانند دوربینهای دید استریو و دوربینهای عمقی، نمونههایی از حسگرهای ویدیویی هستند که ممکن است برای جمعآوری دادهها از محیط پیرامون استفاده شوند.
حسگرهای دیگر
طیف وسیعی از انواع مختلف حسگرهای دیگر در داخل اسکلت بیرونی به عنوان منابع اطلاعاتی برای تصحیح حرکت ربات در لحظه از طریق یک کنترلکننده، برای ارزیابی ویژگیهای حرکتی فردی که اسکلت بیرونی پوشیده است، برای فرمان دادن به/ تعدیل حرکت تحقق یافته اسکلت بیرونی استفاده شود.
با توجه به پیچیدگی این دستگاهها، همچنین به دلیل الزامات ایمنی برای تعامل نزدیک با انسان، بسیاری از چالشهای طراحی هنوز حل نشدهاند که فضای قابل توجهی برای بهبود دارند یا نوآوریهای آینده برای آنها تعیین کننده خواهد بود. ابعاد محرک، قابلیت حمل سامانه، مدت زمان باتری و راحتی کاربر چند نمونه هستند.
>> اهمیت و سنجش راحتی در طراحی اسکلت بیرونی
>> چگونه یک اسکلت بیرونی طراحی کنیم ؟
منبع: https://doi.org/10.3390/s22030884
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است».


