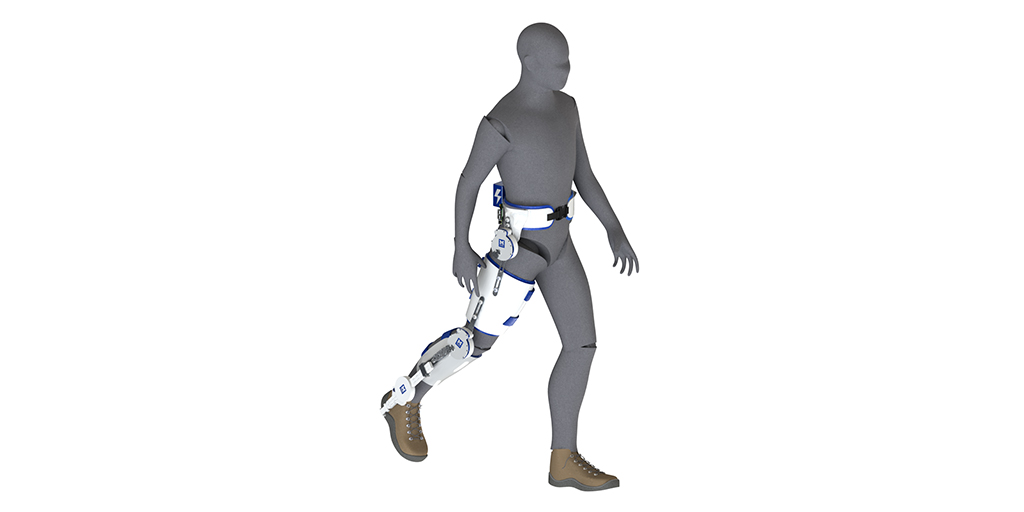
گروهی از دانشگاه میشیگان در تلاش است تا با توسعه نوع جدیدی از اسکلت بیرونی برای اندامهای تحتانی، کارگران و افراد مسن را در انجام حرکات بدنی پشتیبانی کند. این پروژه با بودجه ۱٫۷ میلیون دلاری موسسه ملی بهداشت تامین میشود. در ادامه این مقاله از مجله فناورهای توانافزا و پوشیدنی به توصیف دقیقتر چالشهای این طرح میپردازیم.
چرا طراحی و ساخت اسلکت های بیرونی مهم است؟
از هر هشت آمریکایی، یک نفر با ناتوانی حرکتی و مشکلات جدی در راه رفتن یا بالا رفتن از پلهها مواجه است. تیم U-M قصد دارد یک سامانه اسکلت بیرونی ماژولار و نیرومند ایجاد کند که امکان استفاده در یک یا چند مفصل از پاها را داشته باشد. این پروژه سه ساله، در ابتدا کارگرانی را که اجسام را جابجا میکنند و سالمندانی که با افزایش سن مشکلات حرکتی دارند را مورد مطالعه قرار میدهد. اما در ادامه تمایل دارند مطالعه آنها افراد با معلولیتهای دیگر را نیز شامل شود.
Robert Gregg، سرپرست پروژه، دانشیار مهندسی برق و کامپیوتر، میگوید: «به عنوان یک سامانه پشتیبان، میتوانیم از پشت بندهای مچ پا، لگن یا زانو استفاده کنیم و با افزودن یک موتور و سیستم چرخ دنده، برای افزایش تحرک در یک مفصل خاص، نیرو وارد کنیم. »
پشت بندهای معمولی یا ارتزها (orthotics) نمیتوانند به طور فعال به مفاصل انسان در طول فعالیتهای چالش برانگیز کمک کنند. از طرف دیگر، اسکلتهای بیرونی پیشرفته به دلیل اینکه معمولا به عنوان جایگزین کامل یک اندام مورد استفاده قرار میگیرند، بهگونهای ساخته شدهاند که حرکت در خلاف جهت چرخش موتور را برای کاربران دشوار میسازد. اما کمک جزئی به مفاصل خاص، چالشی متفاوت است.
چالش های مهم طراحی و ساخت اسکلت بیرونی
با این حال، یکی از بزرگترین چالشها برای اسکلت بیرونی تشخیص دقیق هدف کاربر و مطابقت یک اقدام صحیح با آن هدف است. در غیر این صورت، اسکلت بیرونی به تلاش کاربران می افزاید.
Gregg میگوید: « حرکات بدنی انسان طیف وسیعی از حرکات را شامل میشود، در صورتی که اسکلت بیرونی در تشخیص هر کدام از این حرکات اشتباه کند، مانعی در برابر عملکرد کاربر ایجاد خواهد کرد. »
Gregg و گروهش دو راه حل برای این مشکل متصور هستند: استفاده از موتور و جعبه دنده های جدید و نوع متفاوتی از الگوریتمهای کنترل
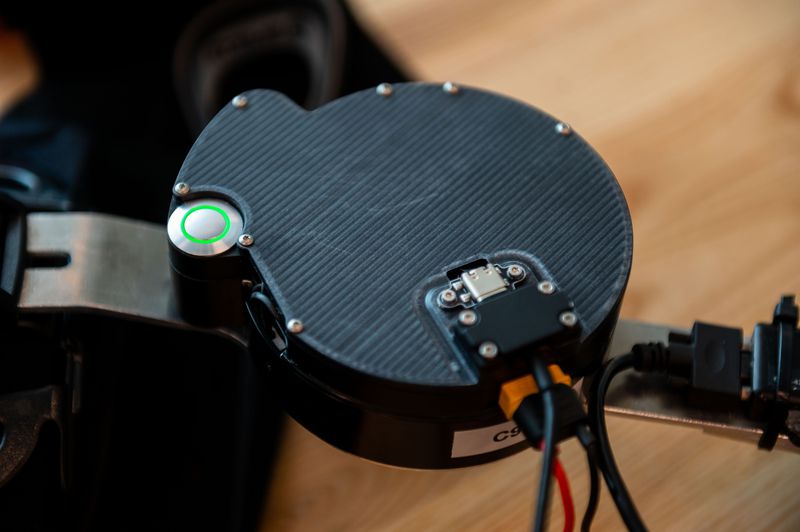
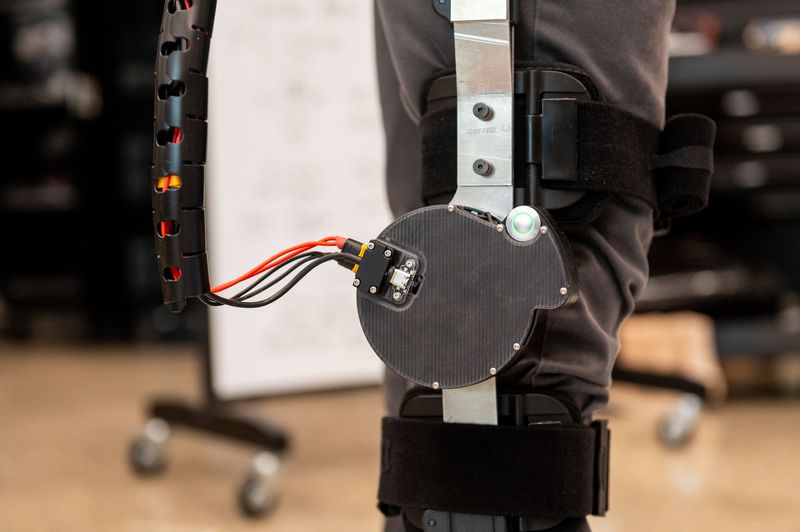
چالش موتور، ارائه گشتاور کافی است، گشتاوری معادل قدرت عضلانی بدن برای اسکلت بیرونی. همچنین این موتور میبایست کوچک و سبک وزن باشد تا پوشش آن به راحتی انجام گیرد. معمولا این چالش را با یک موتور با دور بالا و قرار دادن یک جعبه دنده میتوان حل کرد. سیستم جعبه دنده حرکت مخالف چرخش موتور را برای کاربر سخت میکند.
گروه Gregg این مشکل را با استفاده از موتورهای مسطح و سبکی حل خواهد کرد « pancake» که در ابتدا در هواپیماهای بدون سرنشین و اخیراً در Open Source Leg مورد استفاده قرار گرفتند. این موتورها به دندههای زیادی در جعبه دنده برای ارائه گشتاور کافی نیاز ندارند، که باعث میشود در صورت لزوم به راحتی حرکت معکوس داشته باشند.

الگوریتم هدایت کننده موتور دانشگاه Michigan
این گروه یک الگوریتم کنترلی توسعه داده است که برای کنترل موتور و جعبه دنده، به دانستن حرکتی که کاربر تصمیم به انجام آن را دارد، متکی نخواهد بود.
Gregg میگوید: «باید مطمئن بود که وقتی دستور انجام کار به موتور داده میشود، موتور مخالفت نکند اما چالش زمانی به وجود می آید که قصد انسان دقیقا مشخص نباشد. »
گروه مسئله را ساده کرده است و به جای پیشبینی مکان حرکت انسان، روی تغییر نحوه حرکت انسان کار خواهد کرد.
Gregg میگوید: « با این روش ممکن است نیروی گرانش نیز جبران شود: مهم نیست که کجا حرکت میکنید، موتور میتواند نیروی لازم برای جبران را ایجاد کند. مثال دیگر نیروی اینرسی است: مهم نیست کجا حرکت میکنید، موتور میتواند اینرسی اندام را جبران کند تا حرکت آسانتر شود. »
این تیم با همکاری Chandramouli Krishnan ، دانشیار طب فیزیکی و توانبخشی، و Alicia Foster ، متخصص در مرکز U-M، بهترین تنظیمات را به گونه ای که طیف وسیعی از کاربران را پوشش دهد، در نظر خواهد گرفت. آنها همچنین تاثیر مثبت یا منفی وزن اضافی موتور را بررسی خواهند کرد.
Gregg امیدوار است که این پروژه یه سیستمی کم هزینه ختم شود تا هر مرکز پزشکی به راحتی قادر به استفاده از آن باشد و علاوه بر کارگران و افراد مسن، برای گروه های مختلفی از افراد جامعه مفید واقع شود.
یک اسکلت بیرونی شخصی برای راه رفتن در دنیای واقعی
چالش جهانی نوآوری ۲۰۲۱: رقابتی برای نمایش بهترین ربات های کمکی
منبع: سایت خبری دانشگاه Michigan
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


