یک ربات یک پا که میتواند بایستد، بپرد و تعادل خود را روی سطوح شیبدار یا ناپایدار حفظ کند، مسیری ارزان برای ساخت رباتهای دوپا و اسکلتهای بیرونی متعادل است. پژوهشگران مؤسسه فناوری تویوتا (TTI) در ناگویای ژاپن، ربات یک پای خود با نام TTI Hopper را با استفاده از موتورها و چرخ دندههای ساده و هزینه کمتر از ۱۰۰۰ دلار ساختند. آنها سپس الگوریتمی طراحی کردند که تواناییهای محدود این اجزا را جبران میکرد. کنترل کنندهی حرکت به ربات این امکان را میدهد تا با یک پا بایستد، بپرد، حرکت کند و تعادل خود را هنگام ایجاد اختلال حفظ کند. این الگوریتم را میتوان در اسکلتهای بیرونی بکار برد تا افرادی که از اسکلت بیرونی برای کمک به راه رفتن استفاده میکنند نیازی به عصا برای حفظ تعادل خود نداشته باشند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
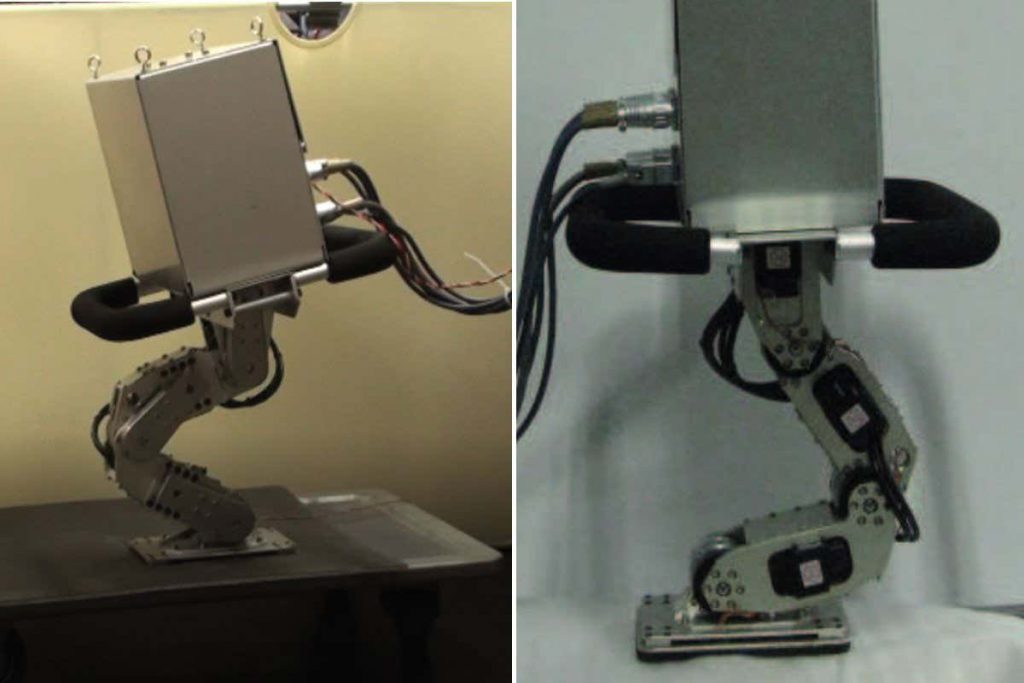
رباتی یک پا با قابلیت حفظ تعادل روی سطوح مختلف
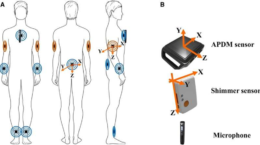
Barkan Uğurlu، که اکنون در دانشگاه اوزیگین استانبول ترکیه تحصیل میکند، میگوید: «در رباتیک، ما گاهی از هیدرولیک استفاده میکنیم، زیرا میتوان آنها را سریع فعال کرد. یا عملگرهای الکتریکی که دارای سیمپیچهای ویژه یا فشارسنج برای اندازهگیری نیروهای داخلی هستند. ما در طراحی ربات خود از موتورهای DC و چرخ دنده استفاده کردیم. در واقع ما تنها زاویه مفصل را اندازه میگیریم و از یک حسگر نیروی کم هزینه در پای رباتیک خود استفاده کردیم».
این الگوریتم موجب میشود مفاصل در صورت نیاز به جذب شوکها به صورت روان حرکت کنند و هنگامی که ربات مجبور است حرکت کند یا در حین دویدن فشار وارد کند، مفاصل محکم میشوند. این الگوریتم به ربات اجازه میدهد حتی در شرایط سخت و ناپایدار، مانند سطوح شیبدار یا سطوح در حال حرکت، تعادل خود را به خوبی حفظ کند.
Uğurlu معتقد است توانایی سازگاری با مسیر، جدید نیست، اما او و همکارانش ثابت کردند الگوریتم آنها ثبات ربات را با توجه به شیب و حرکت سطح در طول آزمایشها، تضمین میکند. آنها این کار را با محاسبه نیروهای عمودی و افقی انجام دادند که موتورها و جاذبه بر روی پا اعمال میکند.
پژوهشهای Uğurlu ادامه دارد. وی در تلاش است این الگوریتم را در اسکلتهای بیرونی و برای کمک به افرادی بکار گیرد که توانایی حرکت پاهای خود را از دست دادهاند. او میگوید: «اسکلتهای بیرونی موجود در بازار قابلیت حفظ تعادل خود را ندارند. آنها پاهای شما را حرکت میدهند، اما برای حفظ تعادل، بیمار باید قسمت بالای بدن خود را با عصا درگیر کند. ایده من این است که از توانایی سازگاری با انواع مسیر برای خلاص شدن از عصا استفاده کنم».
بیشتر بخوانیم:
>> توسعه پروتزهای رباتیک برای کمک به حفظ تعادل حین راه رفتن
>> استفاده ربات دورگردان MIT از عکس العمل های انسان برای پیاده روی و حفظ تعادل
منبع: https://doi.org/10.1007/s10514-021-10010-z
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»