رباتهای اسکلت بیرونی برای توانبخشی اندام تحتانی (LLRER) نقش مثبتی در توانبخشی و کمک به بیماران مبتلا به اختلالات حرکتی دارند و برای بهبود وضعیت جسمی بیماران مفید هستند. این دستگاهها از نظریهها، تکنیکها یا ساختارهای پیشرفته و همچنین دادههای سینماتیک و دینامیک انسان استفاده میکنند. با این حال، به دلیل پیچیدگی ویژگیهای بدن انسان و قوانین حرکتی، تئوری یا فناوری اعمال شده در طراحی اسکلتهای بیرونی هنوز مورد مطالعه هستند. برای آشنایی با انواع اسکلتهای بیرونی اندام تحتانی با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

تأثیر و نقش اسکلتهای بیرونی
یکی از مهمترین دلایلی که افراد مبتلا به اختلال عملکرد اندام تحتانی نمیتوانند به طور مستقل فعالیتهای اساسی زندگی روزمره را انجام دهند مسدود شدن مسیرهای عصبی است. دانش پزشکی نشان داده است که ورزش مکرر مسیرهای عصبی بیمار را دوباره فعال میکند. اسکلتهای بیرونی توانبخشی ترکیبی از هوش مصنوعی و دستگاه فعال مکانیکی برای کمک به بیماران است. این فناوری موجب حرکت اندام تحتانی و تقویت نشاط عضلانی میشود، که یک روش مستقیم و مؤثر برای جبران، جایگزینی یا ترمیم اختلال عملکرد بدن است. همچنین یکی از راههای مهم برای حل مشکل کمبود پرستار ناشی از پیری جمعیت است. اسکلتهای بیرونی این امکان را برای بیماران مبتلا به اختلالات اندام تحتانی فراهم میکنند تا به جامعه برگردند و از بار روی دوش خانوادهها و جامعه بکاهند.
در سالهای اخیر، دانشمندان انواع اسکلتهای بیرونی برای توانبخشی اندام تحتانی طراحی کردهاند که به حرکت و توانبخشی مفاصل مختلف، راه رفتن و همچنین فعالیتهای روزمره زندگی کمک میکند. ربات اسکلت بیرونی مفصل ران میتواند ثبات تنه را بهبود بخشد، میزان متابولیسم را کاهش دهد و تأثیر کلی بر اندام تحتانی دارد. اسکلت بیرونی زانو میتواند قدرت لازم برای حرکت مفصل زانوی بیمار را فراهم کند و میزان حمایت را توسط فعالیت عضلانی کاربر کنترل کند. اسکلت بیرونی مچ پا میتواند از فشار روی مفصل مچ پا بکاهد و از کاربر در برابر آسیب بیشتر حین حرکت یا توانبخشی محافظت کند. برخی اسکلتهای بیرونی توانبخشی اندام تحتانی برای شبیهسازی و کمک به گام برداشتن طبیعی طراحی میشوند.
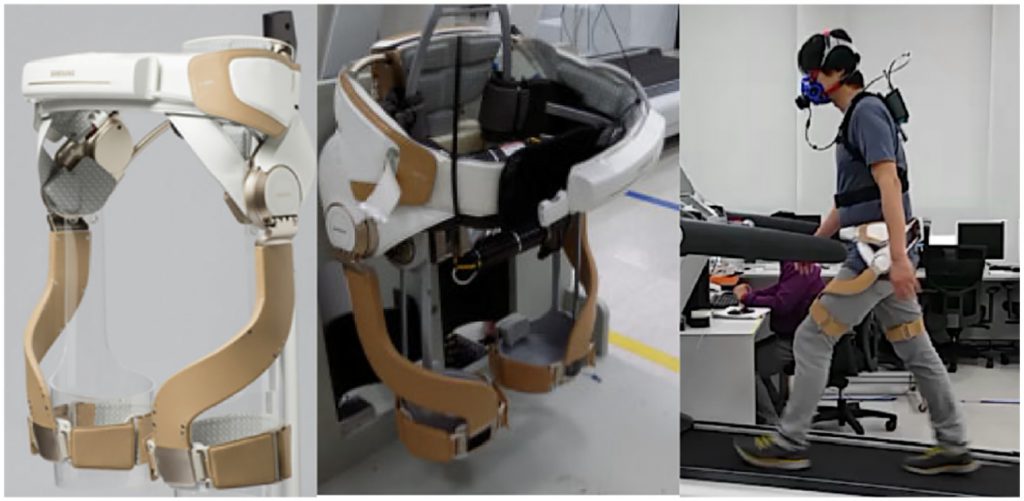
اسکلت بیرونی EksoNR که برای کمک به بیماران هنگام توانبخشی در حالت ایستاده و راه رفتن طراحی شده است، از ستون فقرات، تنه و پاها از جمله مفصل ران، زانو و مچ پا حمایت میکند و موجب ایجاد الگوهای حرکتی صحیح در توانبخشی میشود. همچنین EksoNR به عنوان نخستین اسکلت بیرونی تأیید شده توسط سازمان غذا و داروی آمریکا (FDA) برای کاربردهای پزشکی در درمان بیماران مبتلا به سکته مغزی، آسیبهای مغزی و آسیبهای نخاعی شناخته شده است.
پس اسکلتهای بیرونی نقش مثبتی در توانبخشی و کمک به اندام تحتانی در بیماران مبتلا به اختلالات حرکتی دارند و برای بهبود وضعیت جسمی بیماران مفید هستند. در ادامه با این رباتها بیشتر آشنا میشویم:
ربات اسکلت بیرونی مفصل ران (HER)
ساختار اسکلتهای بیرونی مفصل ران شبیه به هم است و بیشتر روی مفصل و استخوان ران پوشیده میشوند. این اسکلتهای بیرونی میتوانند به بیماران با تمرینات توانبخشی مفصل ران، فلکشن/ اکستنشن/ ابداکشن و اداکشن کمک کنند. با این حال، درجه آزادی مفصل ران انسان در فضا چند بعدی است. درجه آزادی در رباتهای فعلی تأثیر خوبی داشته است، اما برای بهبود همکاری انسان و ماشین هنوز هم باید بهبود یابد.
اسکلت بیرونی مفصل ران میتواند عملکرد راه رفتن کاربران را بهبود بخشد و هزینه متابولیسم پیادهروی را کاهش دهد. این دستگاه برای توانبخشی بیماران پس از سکته مغزی، کمک به افراد دچار تروما، بهبود قدرت عضلانی افراد مسن و کمک به حفظ تعادل در افراد دارای ضعف عضلانی مفید است.
ربات اسکلت بیرونی زانو (KER)
مفصل زانو مفصل اصلی حرکتی اندام تحتانی و آسیبپذیرترین و حساسترین مفصل است. اسکلتهای بیرونی میتوانند توانایی حرکت پا را بهبود بخشند، مصرف انرژی حرکات را کاهش دهند و برای حرکات اندام تحتانی قدرت و کمک ایجاد کنند.

اسکلت بیرونی توانبخشی راه رفتن (GRE)
GRE میتواند به بیماران در تکمیل راه رفتن طبیعی و تأمین نیروی آن کمک کند. این اسکلتهای بیرونی برای بیماران با خط سیر غیرطبیعی راه رفتن یا مفصل مناسب است.
استفاده از سیگنالهای EEG (سیگنالهای مغزی) برای تشخیص قصد کاربر و کنترل وضعیت ربات میتواند تعامل میان انسان و رایانه را در GRE بیشتر کند. سیگنالهای EEG برای طبقهبندی وظایف استفاده میشوند. ربات با کمک EEG هدف بیمار را تشخیص میدهد و توانبخشی را مؤثرتر میکند. به طوری که رباتها میتوانند وضعیت کار قابل قبولی را برای بیماران فراهم کنند که این امر برای بازتوانی راه رفتن یا بهبود وضعیت ایستادن کاربران مفیدتر است.
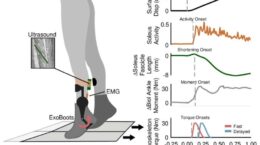
تشخیص سیگنال EMG (سیگنال الکتریکی عضلات) نیز مؤثر است. با ارزیابی این سیگنال، ربات تنها در مواقع نیاز، انرژی لازم برای راه رفتن یا ایستادن را فراهم میکند. اگر کنترل ربات با فناوری تشخیص سیگنال EEG یا EMG همراه باشد، ممکن است حالت حرکتی مورد نیاز را برای بیماران انعطافپذیرتر کند.
برخی از ساختارها و دستگاههای امیدوار کننده
عضله مصنوعی پنوماتیک یک مسیر پیشرفت امیدوار کننده است، زیرا رباتهای نرم از نظر سازگاری، مقاومت در برابر عدم اطمینان و ایمنی انسان مزایای بیشتری نسبت به رباتهای سخت دارند.
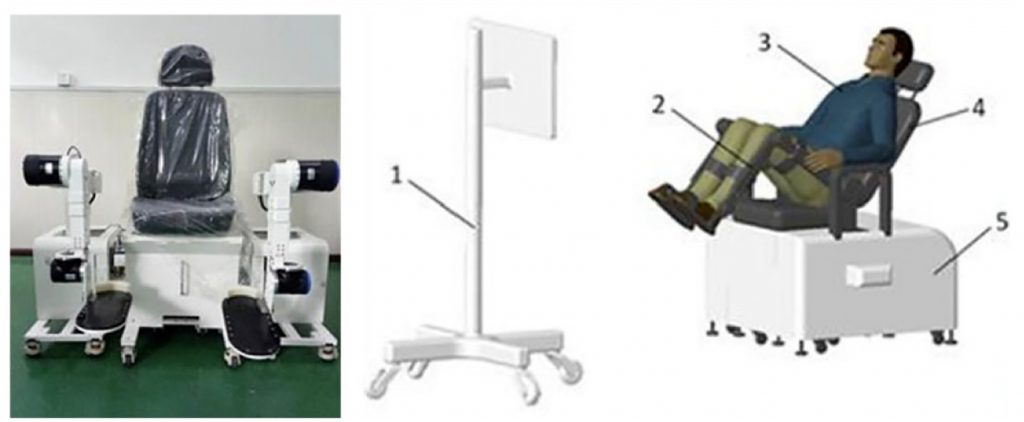
آموزش اندام تحتانی در حالت نشسته و خوابیده میتواند از وزن روی پاهای کاربر بکاهد و دامنه حرکات اندام تحتانی را افزایش دهد. ربات توانبخشی نشسته و دراز کشیده میتواند برای بهبود ثبات آموزش توانبخشی بیمار استفاده شود.
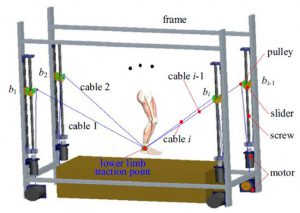
دستگاه توانبخشی راه رفتن که با کابل کنترل میشود، رویکرد جدیدی است که به تازگی ساخته شده است و میتواند تعامل دو طرفه انسان و ماشین را تحقق بخشد.
ربات های اسکلت بیرونی کمکی در زندگی روزمره (DLAER)
این رباتها میتوانند از طریق حمایت، پشتیبانی و کمک به کاربران، از بار اندام تحتانی بکاهند و به بیماران در انجام فعالیتهای روزمره کمک کنند. برای بیماران سکته مغزی، بیماران دچار ضربه مغزی، بیماران مبتلا به اختلالات حرکتی ناشی از آسیب نخاعی (SCI) و افراد مسن با ضعف عضلانی و قدرت مفصلی کافی مناسب است. اسکلتهای بیرونی میتوانند قدرت لازم برای حرکت اندام تحتانی را تأمین کنند و به بیماران برای بالا رفتن از پلهها، اسکات، نشستن و ایستادن و راه رفتن کمک کنند.

فناوری بهبود ایمنی DLAERها
برای ارگانیسمها و رباتها، توانایی درک و پاسخ به اغتشاشات و تغییرات در محیط ضروری است. DLAERها باید توانایی تشخیص موانع را برای بهبود ایمنی داشته باشند. برخی از پژوهشگران عملی بودن برخی از ردیابهای موانع را به اثبات رساندهاند. ردیابهای موانع میتوانند نوع مسیر را شناسایی و شرایط کار را تنظیم کنند. پژوهشگران باید دقت فناوری تشخیص را بهبود بخشند تا اجازه ندهند تصمیمی اشتباه به کاربران آسیب برساند. برخی از الگوریتمهای یادگیری پیشرفته و الگوریتمهای کنترل نیز میتوانند توانایی هماهنگی انسان و ماشین را بهبود بخشند.
سایر روشهای پزشکی برای توانبخشی اندام تحتانی
مطالعات پژوهشگران نشان میدهد ترکیبی از روشهای مختلف پزشکی توانبخشی میتواند تأثیر بهتری داشته باشد مانند تحریک الکتریکی عملکردی (FES) یا درمان طب سوزنی.
تحریک الکتریکی عملکردی (FES) می تواند عضلات را برای تولید حرکت مفصل تحریک کند و یا اندام تحتانی را در حرکت تحریک کند تا با اسکلت بیرونی همکاری کنند.
تحریک الکتریکی عملکردی کاستیهایی دارد. کاربران برای ایستادن به تحریک با شدت بالا احتیاج دارند. و برای حمایت از حالت ایستاده، کاربر باید از قدرت عضلانی کافی برخوردار باشد، که با تمرین عضلات حاصل میشود.
طب سوزنی و درمانی برای اصلاح وضعیت بدن، شکل عضله و حرکت اندام تحتانی مفید است و عملکرد حرکات اندام تحتانی بیماران را بازیابی میکند. همه اسکلتهای بیرونی میتوانند با طب سوزنی و FES ترکیب شوند، این امر به نتایج بهتر منجر میشود.
پژوهشهای موجود در زمینه اسکلتهای بیرونی توانبخشی هنوز دارای مشکلاتی هستند که از جنبههای زیر نیاز به بهبود دارند:
۱- طراحی ساختار و سازوکار: ربات ها در حال حاضر نمیتوانند حرکات چند بعدی اندام تحتانی را کاملاً شبیهسازی کنند و آزادی حرکت اندام تحتانی را محدود میکنند.
۲- روشهای کنترل: پژوهشگران از روشهای مختلف کنترل استفاده میکنند. اگرچه سیستمهای کنترلی میتواند به خوبی روابط متقابل انسان و ماشین را تنظیم کند، اما نمیتواند به طور کامل به کمک شخصیسازی شده دست یابد.
۳- ارزیابی اثر توانبخشی: در روند مطالعه اسکلت بیرونی، بیشتر افراد مورد آزمایش افراد سالم هستند، این آزمایشها در محیط آزمایشگاه انجام شده است، زمان آزمون و تعداد افراد محدود است. دانشمندان انواع مختلفی از اسکلتهای بیرونی را طراحی کردهاند اما تأثیرات طولانی مدت انواع اسکلتهای بیرونی برای روشن شدن بیشتر مزایا و معایب آنها هنوز بررسی نشده است.
۴- ایمنی و همکاری انسان و ماشین: رباتهای توانبخشی نمیتوانند عملکرد اندام تحتانی را کاملاً تقلید کنند، یا جایگزین انسان برای تصمیمگیری و تنظیم در محیطهای پیچیده باشند و توانایی شناسایی موانع و احساس محیط هنوز به بهبود نیاز دارد.
بیشتر بخوانیم:
>> آشنایی با اسکلت های بیرونی در حال توسعه در جهان
>> کاهش انرژی موردنیاز برای راه رفتن و تولید برق با استفاده از اسکلت بیرونی
منبع: doi.org/10.1177/16878140211011862
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»