در حوزه رباتیک، پژوهشگران به طور مداوم به دنبال روشهایی هستند که رباتها را قادر به انجام کارها با بالاترین سرعت، بیشترین راندمان و در عین حال کمترین هزینه، بکند. مهندسین دانشگاه آریزونای شمالی نیز با به کارگیری عضلات پیچشی مصنوعی سعی در ارائه روشی برای ساخت عضلات انعطافپذیر دارند. برای آشنایی با این عضلات پیچشی یا کاواتاپی با مجله فناوریهای توان افزا و پوشیدنی همراه باشید.
تلاش برای بکارگیری روشهای جدید و بهتر در فناوری و رباتیک نرم، اغلب بر اساس اصول بیومتریک است که در آن اجزای ماشین برای تقلید از حرکات عضلات انسان، و در حالت ایده آل برای کمک به عملکرد بهتر عضلات انسان، طراحی میشوند. با وجود عملکردی که محرکهایی مانند موتورهای الکتریکی و پیستونهای هیدرولیکی دارند، شکل صلبشان، نحوه استقرار آنها را محدود میکند. به همین دلیل زمانی که رباتها بیش از پیش شکل بیولوژیکی به خود میگرند و تقاضای این دسته از رباتها افزایش مییابد، محرکها نیز میبایست تغییر شکل دهند.
آشنایی با پژوهشگران عضلات کاواتاپی
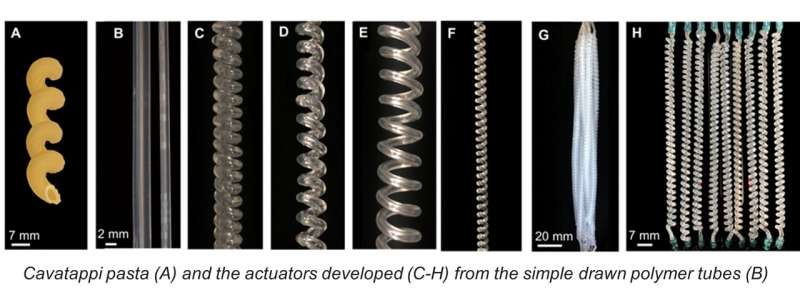
پروفسور Michael Shafer و پروفسور Heidi Feigenbaum از گروه مهندسی مکانیک دانشگاه آریزونای شمالی، به همراه دانشجوی تحصیلات تکمیلی Diego Higueras-Ruiz، مقالهای را در حوزه علم رباتیک در آزمایشگاه سامانههای فعال دینامیکی NAU منتشر کردند. این مقاله با عنوان “کاواتاپی شدن عضلات مصنوعی در اثر کشیدن، چرخاندن و پیچاندن لوله های پلیمری”، به این جزنیات میپردازد که چگونه این فناوری جدید به دلیل انعطاف پذیری و سازگاری، انجام حرکات بیشتری، مشابه حرکات اندام انسان را امکانپذیر میکند و حتی در چند معیار عملکرد بهتری از اندام انسان دارد.
Shafer گفت: “ما به این محرکهای خطی جدید عضلات مصنوعی به دلیل شباهت آنها به ماکارونی ایتالیایی، کاواتاپی میگوییم.”
آشنایی با محرک های کاواتاپی
محرکها به دلیل ساختار پیچ خورده یا مارپیچی، انرژی بیشتری را میتوانند تولید کنند و آنها را به یک فناوری ایده آل برای مهندسی زیستی و کاربردهای رباتیکی تبدیل کنند. طی نتایج نخستین، آنها نشان دادند که عضلات مصنوعی کاواتاپی پنج تا ده برابر عملکرد و کارایی بهتری نسبت به عملکرد اندام اسکلتی انسان از لحاظ قدرت و کارایی داشتند و با ادامه توسعه انتظار میرود عملکرد بالاتری نیز حاصل شود.

Shafer گفت: “عضلات مصنوعی کاواتاپی مبتنی بر محرکهای پلیمری پیچ خورده (TPA) هستند که از ابتدا به دلیل قدرت، وزن سبک و ارزان بودن، انقلابی به پا کردند. اما عملکرد آنها بسیار ناکارآمد و کند بود زیرا میبایست گرم و خنک شوند. علاوه بر این، کارایی آنها فقط حدود دو درصد است. ما برای کاواتاپی، این مشکل را با استفاده از یک مایع تحت فشار حل کردیم، به همین دلیل فکر میکنیم این دستگاه پذیرفته شود. سرعت پاسخ این دستگاه همان سرعتی است که مایع با آن پمپ میشود. نقطه قوت این دستگاه، کارایی آن است. ما بازدهی انقباضی آن را تا حدود ۴۵ درصد افزایش دادهایم که در زمینه عملکرد نرم مقدار زیادی است.“
مهندسان عقیده دارند که این فناوری میتواند در کاربردهای رباتیک نرم، محرکهای رباتیک معمولی (مانند رباتهای پیاده روی) یا حتی به طور بالقوه در فناوریهای کمکی مانند اسکلتهای بیرونی یا پروتزها مورد استفاده قرار گیرد.
Shafer گفت: “ما انتظار داریم که در آینده از عضلات مصنوعی کاواتاپی به دلیل سادگی، ارزان و سبک بودن، انعطاف پذیری و خصوصیاتی که در بازیابی انرژی کرنشی دارند، بیشتر مورد استفاده قرار گیرند.”
طراحی پیکربندی حسگرهای ربات های نرم با الگوریتم های رایانه ای
حسگر فشار مقاوم و منعطف نویدبخش فناوری های رباتیک نرم
نخستین میکروربات با ماهیچه های نرم: RoboBee
منبع: techxplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


