پژوهشگران دانشگاه شهر هنگ کنگ یک حسگر نرم برای اندازهگیری حساس نیروهای برشی اعمال شده روی سطح ایجاد کردهاند. هنگامی که این حسگر به گیرههای رباتیک متصل شود، حس لامسه امکان کنترل دقیق اشیا را فراهم میکند. این حسگر ربات را قادر میسازد عملکردهای چشمگیری مانند نخ کردن یک سوزن و گرفتن تخم مرغ بدون شکستن آن را انجام دهد. پژوهشگران امیدوارند این حسگر پروتزهای نسل آینده را قادر بسازد وظایفی با کنترل بسیار دقیق و حساس انجام دهند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
تشخیص نیروی برشی
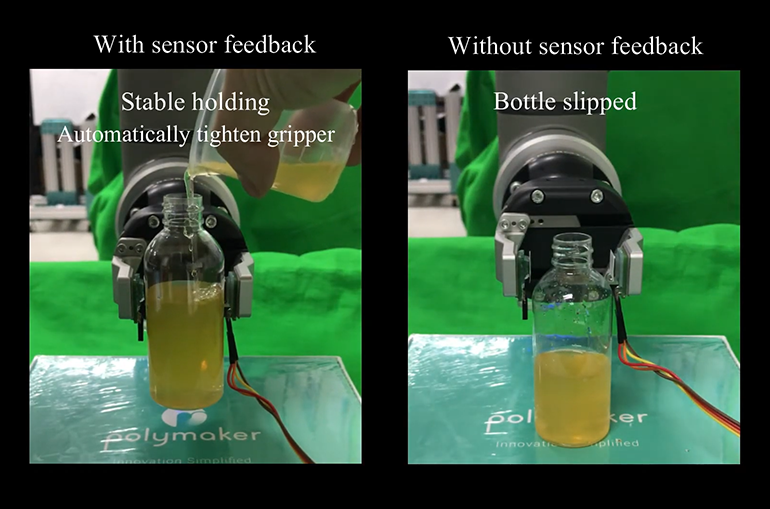
پوست انسان در تشخیص نیروی برشی ماهر است، این نیرویی است که هنگام لغزش دو جسم روی یکدیگر ایجاد میشود. وقتی احساس میکنید چیزی از دست شما میلغزد، واکنش طبیعی شما این است که دست خود را محکم کنید، اما رباتها (یا پروتزهای مجهز به موتور) نمیتوانند به طور معمول این کار را انجام دهند. در نتیجه انجام برخی کارها با استفاده از دستها یا گیرههای رباتیک ممکن است دشوار باشد و آنها کمی دست و پا چلفتی بنظر برسند.
این مسائل الهامبخش حسگر انعطافپذیر جدیدی است که از طبیعت چند لایه پوست تقلید میکند. لایه بالایی مغناطیسی است و وقتی نیروی برشی به آن اعمال شود و حسگر تغییر شکل دهد، تغییر حاصل در میدان مغناطیسی ثبت میشود. همچنین میتواند بین نیروی برشی و نیروی خارجی وارد شده به طور عمود بر یک جسم تمایز قائل شود.
Yan Youcan، پژوهشگر درگیر در این مطالعه، توضیح داد: «تمایز بین نیروها مهم است زیرا هر جزء نیرو تأثیر خاص خود را بر روی جسم دارد. و لازم است که مقدار دقیق هر یک از اجزای نیرو را برای تجزیه و تحلیل یا کنترل حالت ثابت یا متحرک جسم بدانیم».
توسعه الگوریتم لمسی کارآمد
این سامانه برای توصیف دقیق موقعیت محرکهای تأثیرگذار بر آن، از یادگیری ماشین استفاده میکند. دکتر شن یاجینگ، دیگر پژوهشگر این مطالعه، گفت: «ما با استفاده از یادگیری عمیق یک الگوریتم لمسی کارآمد با وضوح فوقالعاده ایجاد کردهایم و به بهبود ۶۰ برابری دقت در تعیین موقعیت تماس دست یافتهایم. این نخستین حسگر لمسی است که به طور همزمان تواناییهای تجزیه و تفکیکپذیری بالا را دارد».
تاکنون، این حسگر یک گیره رباتیک را قادر به انجام برخی از کارهای پیچیده کرده است. این فناوری میتواند مهارت بیشتری به دستگاههای پروتز بدهد. برای نمونه، حسگرها به گیره اجازه میدادند تا تخم مرغ سالم را بدون شکستن نگه دارد، در حالی که یک پژوهشگر سعی داشت آن را بیرون بکشد. وضوح فوق العاده این حسگر به دست رباتیک کمک میکند تا هنگام تماس با یک شیء، موقعیت تماس و نیروی وارد را تنظیم کند.
یاجینگ افزود: «این حسگر پیشنهادی میتواند برای کاربردهای مختلف در زمینه رباتیک مانند چنگ زدن انطباقی، شناسایی بافت، پروتزهای هوشمند و تعامل انسان و ربات مفید باشد. پیشرفت حسگرهای لمسی نرم با ویژگیهای قابل مقایسه با پوست میتواند رباتها را به بخشی از زندگی روزمره ما تبدیل کند».
بیشتر بخوانیم:
>> طراحی پروتز دست ارزان قیمت با قابلیت ارائه بازخورد لمسی
>> تحول در پروتز دست شرکت Ottobock با فناوری بازشناسی الگو
منبع: City University of Hong Kong
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


