رباتها برای انجام امور مختلف طراحی و ساخته میشوند. اما از نظر ظاهری شکلهای تکراری دارند. به عنوان نمونه برای رباتی که میباید در انواع محیط حرکت کند، رباتهای چهارپا انتخاب میشوند. گروهی از دانشگاه MIT از خود پرسیدند که آیا طراحیهای موجود، بهینهترین طرحها ممکن هستند؟ برای آشنایی بیشتر با این ایده و پیاده سازی آن با مجله فناوریهای توان افزا و پوشیدنی همراه باشید.
پژوهشگران دانشگاه MIT برنامهای با نام RoboGrammar نوشتند. این برنامه ابتدا تعداد و شکل قطعات در دسترس را دریافت میکند. ایده اصلی این پژوهش متعلق به Allan Zhao دانشجوی دکتری MIT است. وی در این پژوهش با دانشجوی دکتری Jie Xu، پژوهشگر پسی دکتری Andrew Spielberg و دو استاد با نامهای Daniela Rus و Wojciech Matusik همکاری داشته است.
RoboGrammar برنامه ای برای طراحی ساختار ربات
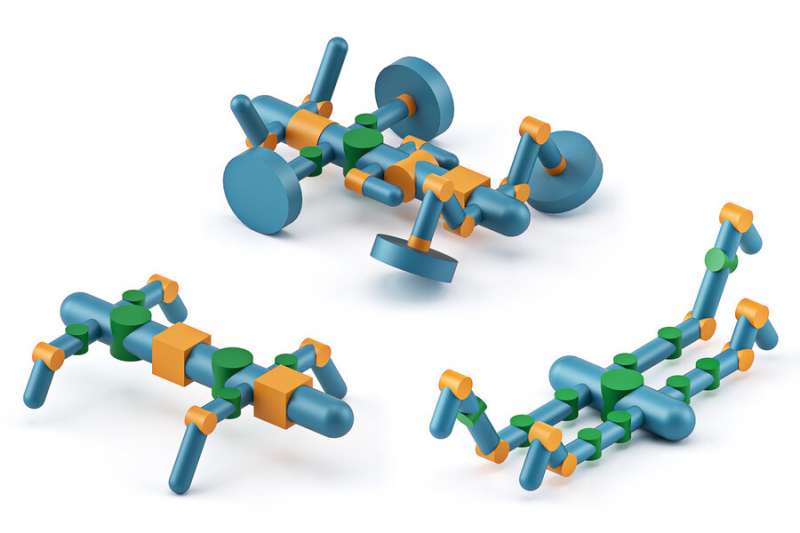
برنامه رایانهای RoboGrammar به طور عمده همه کارها را انجام میدهد. برای اینکه مطمئن باشند طرح حاصل یک طرح اجرایی است، تعداد قانون برای آن وضع کردند. به عنوان مثال قسمتهای مختلف پا باید با بخشی مفصل مانند به یکدیگر متصل شوند، و نه مستقیم به قسمتهای دیگر پا. در طراحی این قوانین دانشمندان از پیکربندی بدن موجودات زنده مانند حشرات، عنکبوت و خرچنگها الهام گرفتند. هر ربات باید یک تنه اصلی متشکل از یک یا چند قسمت داشته باشد. هر بخش تنه میتواند به چند پا متصل باشد. استفاده از چرخ به جای پا ممکن است.
نتیجهای که این گروه برای طراحی شکل رباتها بدست آورد، ساختارهایی متنوع با حداقل تعداد اجزا برای محیطهای خاص بود. برخی از این ساختارها به ماشین مسابقه شبیه بود. برخی نیز مانند انسانی است که در حال انجام دراز و نشست باشد. این ساختارها لزوما بهترین کارکرد را نداشتند. تا اینجا رباتها تنها تعدادی ساختار بدنی هستند. یک برنامه رایانهای میباید کارکرد آنها را ارزیابی کند.
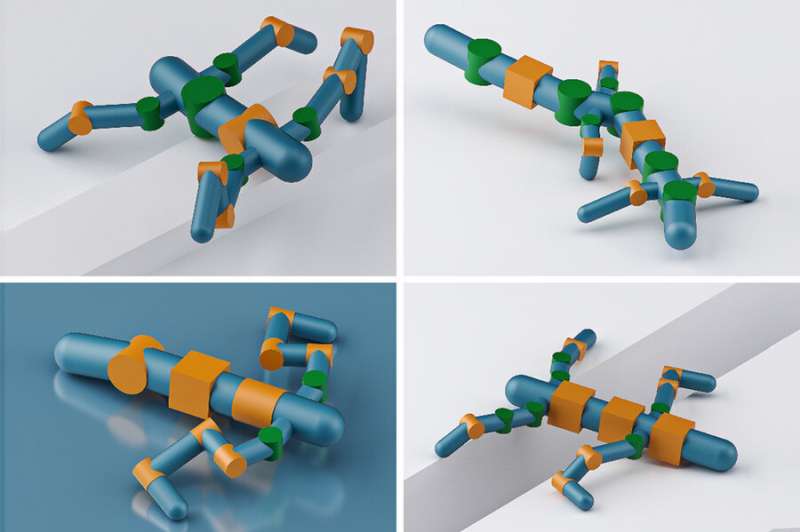
برنامه رایانهای ارزیابی کننده حرکت، یکسری حرکت را با کیفیت آن میسنجد. در هر سنجش سرعت حرکت معیار تعیین کیفیت است. این برنامه رایانهای باید به شکل بدن ربات برای حرکت توجه ویژه داشته باشد. به همین دلیل برنامه ارزیابی کننده برای هر ربات به صورت مجزا نوشته میشود. از نتایج جالب توجه در این پژوهش این بود که طرح رباتهایی که باید در طیفی از زمینها حرکت کند در نهایت چهار پا داشت.
بیشتر بخوانیم:
حسگر فشار مقاوم و منعطف نویدبخش فناوری های رباتیک نرم
ترکیب بستر رباتیک Otto و هوش مصنوعی برای طراحی باتری
در آزمایشگاه رباتیک دانشگاه ایالتی آریزونا چه میگذرد؟ از اسکلت بیرونی رباتیک تا ربات های جمعی
منبع: techxplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


