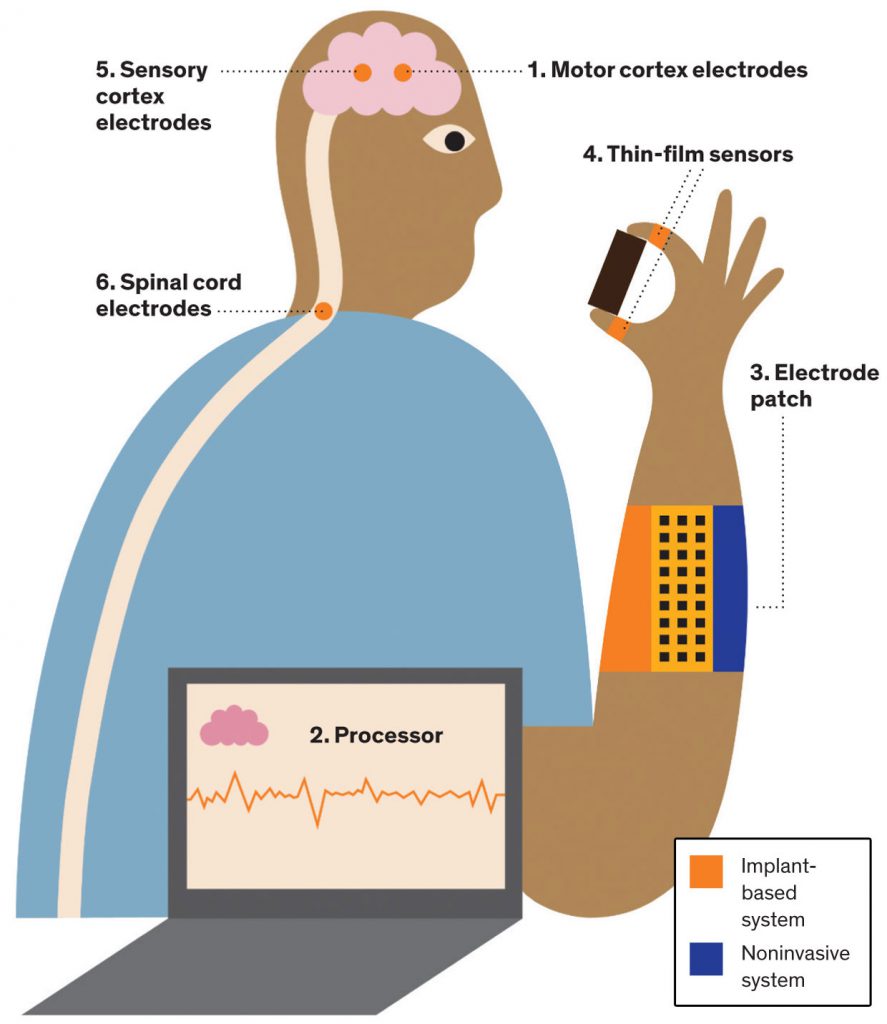
پژوهشگران معتقدند با ایجاد یک مسیر فرعی به نام مسیر بایپس عصبی در اطراف نخاع آسیب دیده میتوان هم حرکت و هم احساس را در افراد دچار ضایعه نخاعی بازیابی کرد. برای اینکه یک فرد معلول بتواند یک شیء را بردارد، آرایهای از الکترودها روی قشر حرکتی مغز وی قرار میگیرد. این الکترودها سیگنالهای عصبی تولید شده را ثبت میکند. سیگنالهای ثبت شده، توسط پردازندهی مجهز به هوش مصنوعی رمزگشایی میشود. دستورالعملها به یک الکترود روی بازوی فرد ارسال میشود تا عضلات تحریک و دست برای برداشتن شیء حرکت کند.
همانطور که فرد شیء را میگیرد، حسگرهای نازک روی دست اطلاعات حسی را ثبت میکند. این دادهها از طریق پردازنده و دستورالعملهای تحریک به یک آرایه الکترود کاشته شده روی قشر حسی مغز ارسال میشود. با تحریک این ناحیه از مغز فرد میتواند شیء را احساس کند. به این فرآیند مسیر بایپس دوطرفه گفته میشود. برای آشنایی بیشتر با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

در سال ۲۰۱۵، گروهی از دانشمندان و مهندسین مغز و اعصاب برای تماشای یک مرد که درحال نواختن موسیقی با گیتار بود، دور هم جمع شدند. او گیتار ساده را با احتیاط نگه داشت و با استفاده از انگشتان دست راست خود به تارها ضربه میزد. چیزی که موجب میشد این بازی بسیار خارقالعاده باشد، این واقعیت بود که این مرد بیش از سه سال از سینه به پایین فلج شده و در این مدت از دستهایش استفاده نکرده بود.
حرکات او به نخاع آسیب دیده در داخل بدن متکی نبود. او از فناوری بایپس عصبی استفاده میکرد تا اهداف خود را به عمل تبدیل کند. در ابتدا، یک ایمپلنت مغزی سیگنالهای عصبی قشر حرکتی مغز را دریافت میکند و به یک رایانه میفرستد. الگوریتمهای یادگیری ماشین این سیگنالها را رمزگشایی میکنند. درنهایت الکترودهایی که به دور بازو بسته شده بودند، دستورالعملها را به عضلات فرد منتقل میکردند. درواقع این فرد از نوعی سیستم عصبی مصنوعی استفاده میکرد.
سیستم عصبی مصنوعی
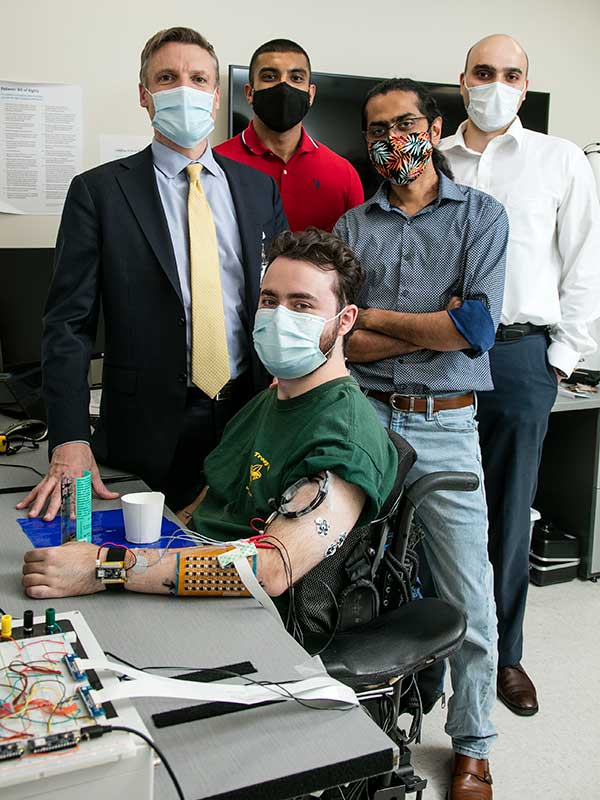
این پژوهش در مؤسسه Battelle Memorial در کلمبوس، اوهایو انجام شد. هدف این گروه، به سرپرستی Chad Bouton، شکستن کدهای عصبی مربوط به حرکت و احساس است تا بتوانند روشهای جدیدی را برای درمان میلیونها معلول در سراسر جهان توسعه دهند. برای این کار ابتدا باید متوجه میشدند سیگنالهای الکتریکی نورونهای مغز با عملکردهای بدن چه ارتباطی دارند. سپس مسیرهای عصبی مناسب برای بازگرداندن حرکت و حس لامسه را ایجاد کنند.
از این اطلاعات برای ساخت دو نوع مختلف سیستم عصبی مصنوعی استفاده میشود. در یک روش برای کنترل اندامهای فلج از ایمپلنتهای مغزی استفاده میشود. در روش دیگر از فناوری پوشیدنی غیرتهاجمی استفاده میشود که کنترل با دقت کمتری فراهم میکند، اما این مزیت را دارد که نیازی به جراحی مغزی ندارد. این فناوری پوشیدنی نیز میتواند به زودی برای بیماران ارائه شود.
Ian Burkhart که در سال ۲۰۱۵ از نخستین نسخه بایپس عصبی مبتنی بر ایمپلنت برای نواختن گیتار استفاده کرد، در سال ۲۰۱۰ از سینه به پایین فلج شد. آسیب وی مانع رسیدن سیگنالهای الکتریکی تولید شده توسط مغز به عضلات میشد. فناوری جایگزین این عملکرد از دست رفته شد. موفقیتهای وی با این فناوری شامل کشیدن کارت اعتباری و ریختن آب از بطری به داخل لیوان بود. این نخستین موردی بود که یک فرد فلج با استفاده از ایمپلنت مغزی، عضلات خود را با موفقیت کنترل میکرد.

فناوری پوشیدنی غیرتهاجمی و بایپس دو طرفه
سامانهای که Burkhart از آن استفاده کرد آزمایشی بود و با پایان یافتن پژوهش، استقلال جدید او نیز خاتمه یافت. در پژوهشی جدید گروه Chad Bouton در حال توسعه فناوری پوشیدنی غیرتهاجمی هستند که نیازی به ایمپلنت مغزی ندارد. در نتیجه میتواند به سرعت توسط جامعه معلولان پذیرفته شود. افراد تتراپلژی از این سامانه برای در دست گرفتن و برداشتن اشیای مختلف استفاده میکنند. گروه در تلاش برای تجاریسازی این فناوری غیرتهاجمی است و امیدوارند ظرف سال آینده از سازمان غذا و داروی ایالات متحده مجوز بگیرد.
آنها همچنین در تلاش برای ایجاد یک بایپس عصبی دو طرفه هستند که از ایمپلنت مغزی برای دریافت بازخورد از حسگرهایی که روی اندام قرار میگیرند استفاده خواهد کرد. این سامانه دو طرفه حرکت و احساس را بازمیگرداند و آزمایش بالینی این روش آغاز شده است. افرادی مانند Burkhart هنگام نواختن موسیقی با دستان فلج خود، میتوانند گیتار را احساس کنند.
پیش از این فلجی یک بیماری دائمی قلمداد میشد. اما در دو دهه گذشته، پیشرفت چشمگیری در خواندن سیگنالهای عصبی از مغز و استفاده از تحریک الکتریکی برای تأمین انرژی عضلات فلج بوجود آمده است.
پیشرفت ایمپلنت های مغزی
از اوایل سال ۲۰۰۰، کنسرسیوم BrainGate کار پیشگامانهای را با ایمپلنتهای مغزی آغاز کرد. این ایمپلنتها سیگنالها را از ناحیه حرکتی مغز میگرفت و از آنها برای کنترل دستگاههای مختلف بهره میبرد. در سال ۲۰۰۷، این الگوریتمها به زنی که در اثر سکته مغزی فلج شده بود، کمک کرد تا با مغز خود ویلچر را کنترل کند. تا سال ۲۰۱۲، این گروه یک زن فلج را قادر ساخته بود تا از یک بازوی رباتیک برای برداشتن بطری استفاده کند. در همین حال، پژوهشگران دیگر از الکترودهای کاشته شده برای تحریک نخاع استفاده میکردند و به افرادی که پاهای فلج دارند توانایی ایستادن و حتی راه رفتن بخشیدند.
اولویت افراد تتراپلژی، بازگرداندن عملکرد دستها است
گروه Chad Bouton به مقابله با هر دو طرف این مشکل ادامه داد: خواندن سیگنالهای مغزی و همچنین تحریک عضلات، با تمرکز بر روی دستها. برای افراد تتراپلژی، یعنی افرادی که چهار اندام فلج دارند، بالاترین اولویت بازیابی عملکرد بازوها و دستها است.
رباتیک این نیاز را تا حدی برطرف کرده است. بازوهای رباتیک موجود در بازار را میتوان با کنترلرهای ویلچر بکار گرفت. پژوهشهایی برای کنترل بازوهای رباتیک از طریق ایمپلنتهای مغزی یا الکترودهایی که روی پوست سر قرار میگیرند انجام شده است. اما برخی از افراد هنوز آرزو دارند از بازوهای خود استفاده کنند. وقتی Burkhart در سال ۲۰۱۶ با مطبوعات صحبت کرد، او گفت ترجیح میدهد بازوی رباتیک روی صندلی چرخدارش نصب نشود، زیرا احساس میکند این موضوع توجه بسیاری را به خود جلب میکند. وی گفت، یک فناوری بدون جلب توجه برای کنترل بازو به او اجازه میدهد شبیه یک عضو عادی در جامعه فعالیت کند.
بازیابی حرکت دستها یک چالش دلهرهآور است. دست انسان بیش از ۲۰ درجه آزادی دارد که میتواند حرکت کند و بچرخد. این بدان معناست که ماهیچههای بیشتری برای تحریک وجود دارند، و این مسئله را برای سامانههای کنترلی بسیار پیچیده میکند. از طرفی ما هنوز به طور کامل نمیدانیم چگونه تمام حرکات پیچیدهی دست در مغز رمزگذاری میشوند. برخلاف این چالشها، گروه Chad Bouton تصمیم گرفتند توانایی حرکت دست افراد تتراپلژی را بازگردانند.
بازیابی عملکرد دست با ایمپلنت های مغزی
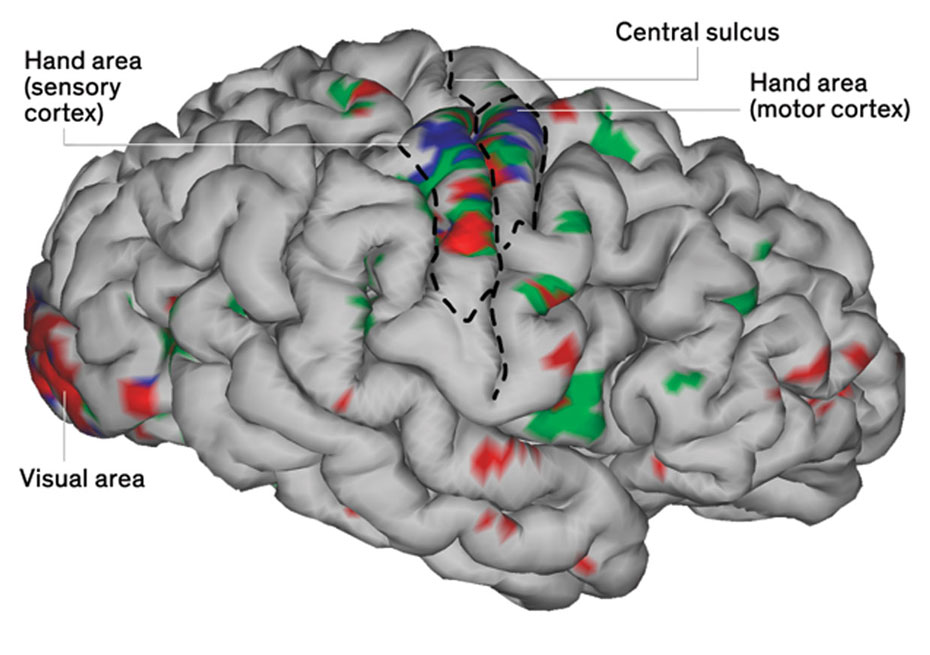
ایمپلنت Burkhart در قشر حرکتی مغز و در منطقهای بود که حرکات دست را کنترل میکند. پژوهشگران به طور گسترده از قشر حرکتی نقشهبرداری کردند، بنابراین اطلاعات بسیاری در مورد چگونگی ارتباط فعالیت عصبی با حرکات دست و هر انگشت به طور جداگانه وجود دارد. اما میزان دادههای به دست آمده از ۹۶ الکترود ایمپلنت بسیار مهیب بود: هر الکترود ۳۰،۰۰۰ بار در ثانیه فعالیتها را اندازهگیری میکرد. در این سیل از دادهها، آنها باید سیگنالهای گسستهای را که به معنای «خم شدن انگشت شست» یا «باز شدن انگشت اشاره» بود، پیدا میکردند.
رمزگشایی سیگنال های عصبی
آنها از ترکیبی از هوش مصنوعی و پشتکار انسان برای رمزگشایی سیگنالها استفاده کردند. داوطلب سرسخت آنها، Burkhart، برای آموزش سامانه به مدت ۱۵ هفته و هر هفته سه جلسه مشارکت داشت. در هر جلسه، Burkhart یک دست متحرک را روی صفحه رایانه مشاهده میکرد که برای نمونه انگشتانش را خم میکرد. او نیز باید تصور میکرد همان حرکات را انجام میدهد. ایمپلنتها فعالیت نورونهای وی را ثبت میکرد. با گذشت زمان، یک الگوریتم یادگیری ماشین فهمید که کدام الگو با خم شدن انگشت شست، باز شدن انگشت اشاره و غیره مطابقت دارد.
هنگامیکه سامانه بایپس عصبی سیگنالها را درک کرد، میتواند الگویی از پالسهای الکتریکی برای تحریک عضلات بازو ایجاد کند، در تئوری از پالسهایی که مغز و نخاع از طریق اعصاب ارسال میکند، تقلید میشود. اما در واقعیت، ترجمه اهداف Burkhart به حرکات عضلانی نیاز به یک دوره شدید تمرین و کالیبراسیون داشت. آنها ساعتهای بیشمار و مجموعههای مختلفی از ۱۳۰ الکترودی که به دور بازوی وی پیچیده شده بود را تحریک کردند تا شیوه کنترل عضلات مچ دست، دست و هر انگشت او را تعیین کنند.
Casey Ellin که به دلیل آسیب نخاعی تا حدی فلج شده بود، نمونه اولیه سامانه بایپس عصبی پوشیدنی را آزمایش میکند.
نسخه غیرتهاجمی سامانه بایپس عصبی
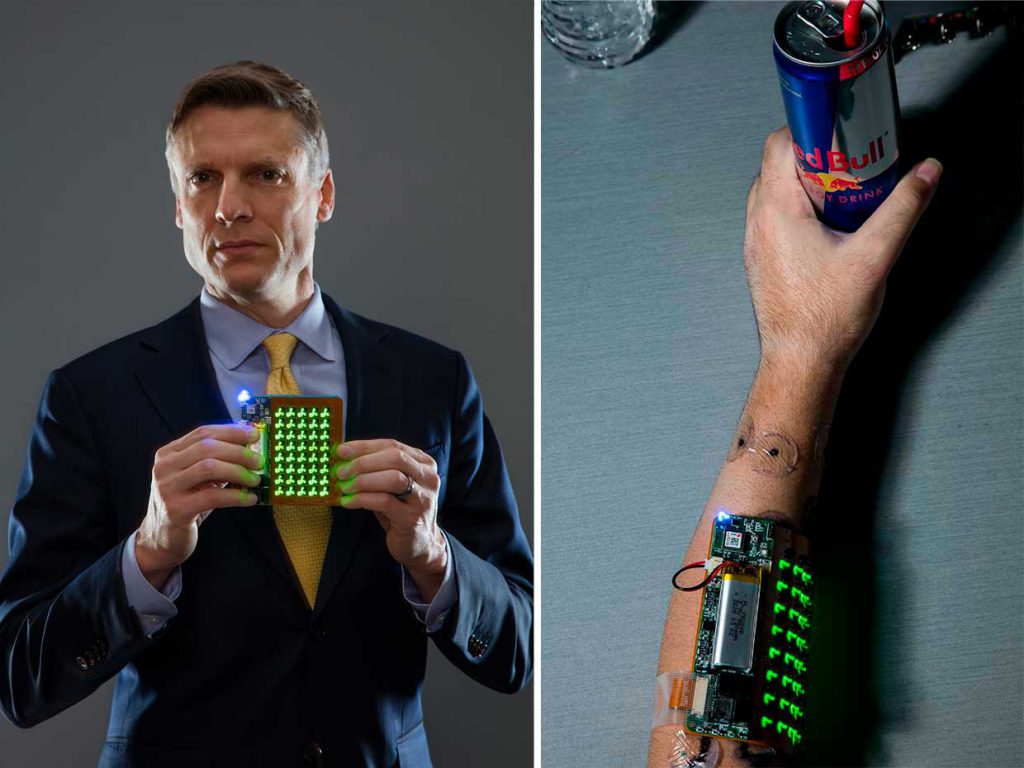
گروه Chad Bouton برای ساختن یک سامانه عملی و راحتتر، تصمیم گرفتند نسخهای کاملاً غیرتهاجمی ایجاد کنند که GlidePath نامیده میشود. آنها داوطلبانی را بکار گرفتند که دچار ضایعه نخاعی بودند اما هنوز حرکتی در شانههایشان داشتند. سپس ترکیبی ویژه از حسگرهای اینرسی و بیومتریک را روی بازوهای داوطلبان قرار دادند و از آنها خواستند برداشتن اشیای مختلف را تصور کنند. دادههای حاصل از حسگرها به الگوریتم یادگیری ماشین تبدیل شد و آنها توانستند اهداف داوطلبان را درک کنند. درنهایت الکترودهای منعطف روی بازوها، عضلات آنها را به ترتیب خاصی تحریک میکند.
این گروه در تلاش است حسگرها و محرکها را در پوشیدنیهای سبک و نامحسوس قرار دهد. همچنین در حال توسعه برنامهای هستند که با این پوشیدنی جفت شود، بنابراین پزشکان میتوانند تنظیمات تحریک را بررسی و تنظیم کنند. این تنظیم به شما امکان میدهد جلسات توانبخشی را از راه دور برگزار کنید و دادههای برنامه در ابر بارگذاری میشود.
بهبود توانبخشی
این فناوری میتواند به افراد آسیب دیده نخاعی و همچنین افرادی که از سکته مغزی بهبود مییابند کمک کند. بیماران سکته مغزی معمولاً تحریک الکتریکی عصبی عضلانی را دریافت میکنند تا به حرکات ارادی آنها کمک کند و موجب بهبود عملکرد حرکتی شود. شواهد قابل ملاحظهای وجود دارد که نشان میدهد هنگامیکه بیمار فعالانه حرکت کند در حالی که الکترودها عضلات مناسب را تحریک میکنند، چنین بازتوانی بهتر جواب میدهد. نشان داده شده است که تلاش متقابل مغز و عضلات موجب افزایش انعطافپذیری یا توانایی سازگاری سیستم عصبی با آسیب میشود. این سامانه اطمینان حاصل میکند که بیمار به طور کامل درگیر شده است چرا که تحریک، ناشی از قصد و نیت بیمار است. با جمعآوری دادهها به مرور زمان میتوان امیدوار بود حتی در صورت خاموش بودن این فناوری، بیماران در نهایت برخی از عملکردها را بازیابند.
به همان اندازه که برنامههای پوشیدنی هیجانانگیز هستند، این فناوری غیرتهاجمی به راحتی حرکات پیچیده انگشت را دستکم در ابتدا کنترل نمیکند. ما انتظار نداریم که فناوری GlidePath بلافاصله مردم را قادر به نواختن یک گیتار واقعی کند.
تجربه Burkhart و بازخورد حسی
هنگامیکه Burkhart از نسخه پیشین بایپس عصبی استفاده کرد، گفت این یک گام بزرگ به سوی استقلال است. اما موارد بسیاری وجود داشت که آنها در نظر نگرفته بودند. او گفت: «احساس عجیبی است، شیئی که در دست دارم را احساس نمیکنم». کارهای روزانه مانند بستن دکمه پیراهن به بازخورد حسی نیاز دارد. پس گروه Chad Bouton تصمیم گرفت روی بایپس عصبی دو طرفه کار کند، که دستورات حرکتی را از مغز به دست منتقل میکند و بازخورد حسی را از دست به مغز میفرستد و از نخاع آسیب دیده در هر دو جهت عبور میکند.
ایجاد بازخورد حسی
برای اینکه مردم دست فلج خود را احساس کنند، هم به حسگرهای دقیق تنظیم شده روی دست و هم به ایمپلنت در منطقه قشر حسی مغز نیاز است. برای حسگرها، آنها با درک شیوه ارسال بازخورد از پوست انسان به مغز آغاز کردند. وقتی چیزی را برمیدارید، برای نمونه یک فنجان یکبار مصرف پر از قهوه، این فشار لایههای زیرین پوست را فشرده میکند. با بالا بردن فنجان، پوست شما حرکت میکند، کشیده میشود و تغییر شکل میدهد. حسگرهای نازکی ایجاد شد که میتوانند فشار فنجان به پوست و همچنین نیروی برشی (عرضی) وارد شده بر روی پوست را هنگام بالا بردن فنجان و کشیدن جاذبه به پایین تشخیص دهند. این بازخورد ظریف بسیار مهم است، زیرا دامنه بسیار محدودی از حرکت مناسب در آن شرایط وجود دارد. اگر فنجان را خیلی محکم فشار دهید، قهوه میریزد.
هر یک از حسگرهای گروه Chad Bouton در مناطق مختلفی قرار میگیرند تا کمترین فشار یا نیروی برشی را تشخیص دهند. با جمعآوری این اندازهگیریها، سامانه دقیقاً شیوه خم شدن یا کشیدگی پوست را تعیین میکند. پردازنده این اطلاعات را به ایمپلنتهای قشر حسی ارسال میکند و به کاربر امکان میدهد فنجان را در دست خود احساس کند و در صورت لزوم نیروی وارد را تنظیم کند.

مزیت تحریک نخاع
گروه Chad Bouton افزون بر تحریک عضلات بازو و قشر حسی، قصد دارد نخاع را نیز تحریک کند. استدلال آنها به این شرح است: در نخاع ۱۰ میلیون نورون با شبکههای پیچیده وجود دارد. پژوهشهای پیشین نشان داده است که این نورونها حتی در صورت عدم وجود دستورات از مغز، توانایی هدایت موقت حرکات بدن را دارند. داوطلبان حرکات فیزیکی را با کمک الکترودهای بازو انجام میدهند و از حسگرها بازخورد دریافت میکنند. آنها معتقدند اگر در حین انجام این فرآیند نخاع تحریک شود، میتوان انعطافپذیری شبکههای آن را تقویت کرد و موجب تقویت اتصالات بین سلولهای عصبی درون نخاع و مرتبط با حرکات دست شد. این امکان وجود دارد که به یک اثر ترمیمی دست یافت که تأثیری طولانی مدت دارد.
Chad Bouton امیدوار است ایمپلنتهای مغزی برای افراد فلج از نظر بالینی اثبات شده و مورد استفاده قرار گیرد. تا این افراد بتوانند با دست خود حرکات پیچیدهای انجام دهند مانند بستن بند کفش، تایپ کردن روی صفحه کلید و نواختن پیانو. هدف این است که به این افراد اجازه دهیم تا عزیزانشان را لمس کنند و در عوض تماس آنها را احساس کنند. ما میخواهیم حرکت، احساس و در نهایت استقلال آنها بازیابی شود.
بیشتر بخوانید:
>> تحریک الکتریکی به بازیابی عملکرد دست و بازو پس از آسیب نخاعی کمک میکند
>> تحریک همزمان مغناطیسی و الکتریکی مغز و اندام ها ، راهی برای تحقق رویای راه رفتن بیماران آسیب نخاعی
منبع: spectrum.ieee
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


