پژوهشگران در آزمایشگاه میکرورباتیک هاروارد در دانشکدهی مهندسی و علوم کاربردی (SEAS) جان ای پاولسون هاروارد، میکرورباتهایی به نام RoboBee یا رباتهای زنبوری ساختهاند که در درون یک جعبهی کوچک شیشهای پرواز میکنند. ادامهی این خبر را در مجلهی فناوریهای توانافزا و پوشیدنی بخوانید.
نخستین پرواز میکروربات با عملگرهای نرم
پژوهشگران SEAS و موسسهی مهندسی زیستی Wyss در هاروارد یک RoboBee با ماهیچه های مصنوعی نرم ساختهاند که به دیوارههای شیشهای ظرف نگهدارندهاش برخورد میکند، روی زمین میافتد و بدون آسیب دیدگی با دیگر RoboBee ها هم برخورد میکند. این نخستین میکرورباتی است که توسط عملگر (محرک)های نرم برای دستیابی به پرواز قابل هدایت طراحی شده است.
دکتر Yufeng Chen، دانشجوی سابق دورهی تحصیلات تکمیلی و پژوهشگر پسادکتری فعلی در SEAS گفت: تلاشهای بسیار زیادی در زمینهی میکرورباتیک انجام شده است تا رباتهای متحرک با عملگرهای نرم ساخته شوند، چون آنها بسیار انعطافپذیر هستند. با این حال، بسیاری از افراد در این زمینه شک و تردید دارند که آیا میتوان از آنها در رباتهای پروازکننده نیز استفاده کرد یا نه؟ زیرا چگالی توان این عملگرها به اندازهی کافی بالا نبوده و هدایت آنها بسیار دشوار است. عملگر ما چگالی توان و هدایتپذیری کافی برای دستیابی به پرواز در حال تعلیق را داراست.
این پژوهش در مجلهی Nature منتشر شده است.
مشکل چگالی توان عملگرهای نرم
پژوهشگران برای حل مشکل چگالی توان، طرحی را بر اساس عملگرهای نرم الکتریکی که در آزمایشگاه دکتر David Clarke در SEAS ساختهاند. این عملگرهای نرم با استفاده از الاستومرهای دیالکتریک، که موادی نرم با خاصیت عایقی خوب هستند، ساخته میشوند که هنگام اعمال میدان الکتریکی تغییر شکل میدهند.
پژوهشگران با بهبود رسانندگی الکترود قادر به راه اندازی عملگر نرمی با فرکانس ۵۰۰ هرتز شدند، که برابر با مقدار معادل در عملگرهای سختی است که در رباتهای مشابه استفاده میشود.
از چالشهای دیگر عملگرهای نرم این است که سامانه تمایل به پیچ خوردن و ناپایدار شدن دارد. پژوهشگران برای حل این مشکل، یک بدنهی پروازی سبک وزن با یک تکه ریسمان محدود کنندهی عمودی طراحی کردند تا از ناپایداری عملگر جلوگیری شود.
طراحی میکروربات پرواز کننده
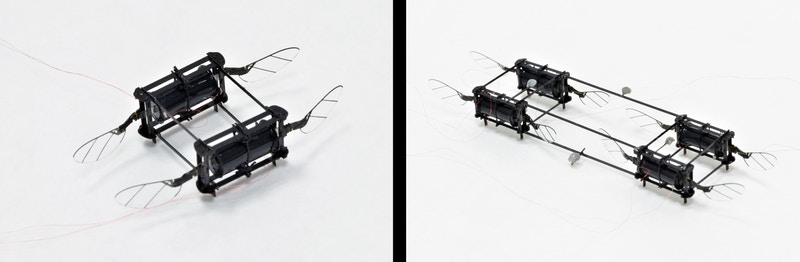
عملگرهای نرم را میتوان براحتی در این رباتهای کوچک مقیاس سرهم بندی و جایگزین کرد. پژوهشگران برای نشان دادن قابلیتهای مختلف پرواز، چندین مدل مختلف از RoboBee با عملگر نرم را ساختند. مدل دو بال میتوانست از زمین بلند شود اما هدایت پذیری مناسبی نداشت. مدل چهار بال با دو عملگر توانست در یک محیط متلاطم پرواز کند و بر چندین برخورد در یک پرواز واحد غلبه کند. همچنین برای نخستین بار یک مدل هشت بال با چهار عملگر، پرواز تعلیقی هدایت پذیری را برای یک میکروربات پروازکننده با عملگر نرم نشان داد.
خانم دکتر Elizabeth Farrell Helbling، دانشجوی سابق فارغ التحصیل در SEAS و نویسنده ی همکار مقاله گفت: یکی از مزایای ربات های کوچک مقیاس و سبک، مقاومت ارتجاعی آنها در برابر اثرات بیرونی است. وی افزود: عملگر نرم یک مزیت اضافی را فراهم میکند زیرا میتواند تاثیر ضربهها را بهتر از رویکردهای عملگری مرسوم جذب کند. این امر در کاربردهای بالقوهای مانند پرواز از میان آوار قابل سقوط در مأموریتهای جستجو و نجات، مفید است.
توضیح ویدئو: پژوهشگران SEAS و موسسهی مهندسی زیستی Wyss در هاروارد یک RoboBee با ماهیچههای مصنوعی نرم ساختهاند که به دیوارههای شیشهای ظرف نگهدارندهاش برخورد میکند، روی زمین میافتد و بدون آسیب دیدگی با دیگر RoboBee ها برخورد میکند. این اولین میکرورباتی است که توسط عملگر(محرک)های نرم برای دستیابی به پرواز قابل هدایت طراحی شده است. اعتبار: آزمایشگاه میکرورباتیک هاروارد/SEAS
بهبود بازده پرواز
در مرحلهی بعد هدف پژوهشگران افزایش بازده پرواز ربات با عملگر نرم است، که هنوز هم بسیار عقبتر از رباتهای پروازکنندهی فعلی است.
دکتر Robert Wood، عضو هیئت علمی هستهی مرکزی موسسهی Wyss، افزود: عملگرهای نرم با خصوصیات عضله مانند و فعال سازی الکتریکی شان یک چالش بزرگ در رباتیک هستند. اگر بتوانیم ماهیچههای مصنوعی با کارایی بالا را مهندسی کنیم، آسمان تنها محدودیت ممکن برای ساخت رباتها خواهد بود!
بیشتر بخوانید:
>> تازه های فناوری/ ربات های جراح
>> Fossil HR، یک ساعت هیبریدی با صفحه نمایش همیشه روشن
>> ربات های نرم از رایانه های ماده نرم بهره خواهند برد
منبع : wyssinstitute
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


