پژوهشی در مجلهی Science Robotics که توسط M.Garrad و همکارانش چاپ شده است، شکلی جدید از رایانه را توصیف میکند که برای هدایت رباتهای نرم ایدهآل است. رایانه مادهی نرم (SMC) از نحوهی رمزگذاری و انتقال اطلاعات در سامانه رگهای بدن الهام گرفته است. برای آشنایی بیشتر با نتایج این پژوهش با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
ربات های نرم
رباتیک نرم محبوبیت زیادی در دههی گذشته کسب کرده است. رباتهای ساخته شده با مواد نرم بهراحتی با محیط اطرافشان سازگار میشوند. لامسهی دقیق یکی از نتایج این سازگاری است. حمل مواد شکننده یا کارکردن در نزدیکی بدن (انسان) از مواردی است که لامسهی دقیق کاربرد دارد.
تاکنون سامانههای رباتیک نرم هدایت شونده با پردازندههای الکترونیکی معمولیاز مواد سختی مانند سیلیکون ساخته میشدند. قراردادن اجزای سخت در یک ساماننهی نرم، انعطافپذیری کلی آن را محدود میسازد. مواد انعطافپذیری استفاده شده در SMC تمام پتانسیل یک ربات نرم را به خدمت میگیرد.
رایانه ماده نرم و پردازش با گیرنده سیال رسانا
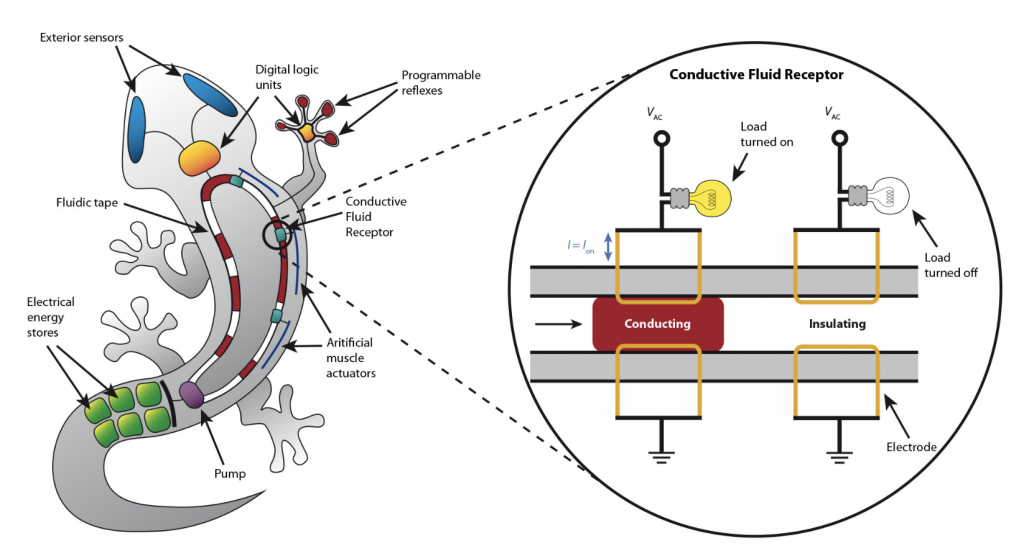
بلوک سازندهی این رایانهی مادهی نرم، یک گیرندهی سیال رسانا (CFR) است. یک CFR از دو الکترود در دو سمت مخالف یک لولهی نرم و به موازات جهت شارش سیال، تشکیل شده است. ترکیبی از سیالات عایق (هوا، بی رنگ) و رسانا (آب شور، قرمز رنگ) درون CFR تزریق میشود. وقتی آب شور دو الکترود را از طریق خاصیت رساناییاش به هم متصل میکند، CFR روشن میشود. با اتصال دادن یک محرک نرم به یک CFR سامانهی هدایت ساده بوجود میآید.
با اتصال چندین CFR به یکدیگر توان محاسباتی SMC ها افزایش مییابد. در پژوهش این گروه، معماریهای مناسب محاسبات آنالوگ و دیجیتال پیشنهاد شده است. بطور نظری وجود معماریهای دیجیتال و آنالوگ به این معناست که SMC ها توانایی پیادهسازی کلیهی الگوریتمهای مورد استفاده در یک رایانهی الکترونیکی را دارا هستند.
ربات های نرم متحرک – نرم کرم ها
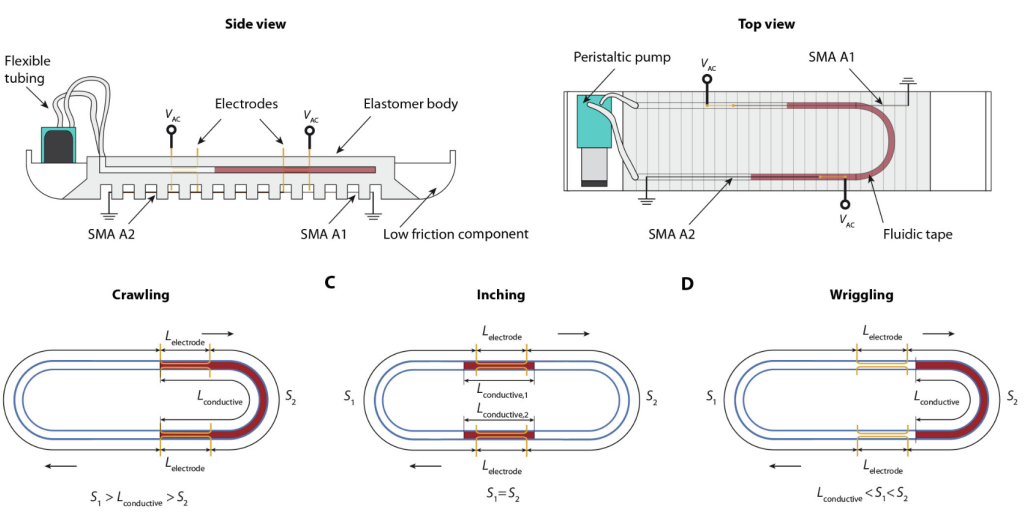
SMC را میتوان براحتی با بدنهی یک ربات نرم ترکیب کرد. مثلا نرمکرمها (softworms)[۱] توسط دو محرک از جنس آلیاژ حافظهپذیر (SMA) رانده میشوند. این محرکها با عبور جریان شارژ کننده، منقبض میشوند. با کنترل الگوی فعالسازی این دو محرک، سه نوع حرکت پیمایشی مشخص قابل تولید است. میتوان یک SMC را با بدنهی یک نرمکرم ترکیب کرد و هریک از این سه حرکت را با تغییر برنامهنویسی SMC تولید کرد. ویدئوی زیر یک نرمکرم – SMC را نشان میدهد که آب شور آن قرمز رنگ است.
پردازش نرم برای رباتیک کاملا نرم
SMC نخستین سامانهی هدایتی مادهی نرم طراحی شده برای رباتهای نرم نیست. گروههای پژوهشی دیگر نیز سامانههای هدایتی سیال[۲] و میکروسیال[۳و۴] را توسعه دادهاند. با این حال رویکردهای گفته شده محدود به هدایت محرکهای سیال هستند. در عوض SMC یک جریان الکتریکی را تولید میکند، به این معنی که میتواند با اکثر محرکهای نرم ارتباط برقرار کند.
یک چالش بزرگ برای رباتیک نرم، توسعهی یک سامانهی رباتیک هوشمند و خودکار است که کاملا از مواد نرم ساخته شده است. این پژوهشگران معتقدند که SMC گامی مهم برای رسیدن به چنین سامانهای است، که در عین حال امکانات جدیدی را نیز در زمینه نظارت بر محیط زیست، پروتز هوشمند، زیستسنسورهای پوشیدنی و کامپوزیتهای خودبهبودگر فراهم میآورد.
منابع علمی :
[۱] Umedachi, T., V. Vikas, and B. A. Trimmer. “Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots.” Bioinspiration & biomimetics 11.2 (2016): 025001.
[2] Preston, Daniel J., et al. “Digital logic for soft devices.” Proceedings of the National Academy of Sciences 116.16 (2019): 7750-7759.
[3] Wehner, Michael, et al. “An integrated design and fabrication strategy for entirely soft, autonomous robots.” Nature536.7617 (2016): 451.
[4] Mahon, Stephen T., et al. “Soft Robots for Extreme Environments: Removing Electronic Control.” ۲۰۱۹ ۲nd IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2019.
بیشتر بخوانیم:
اخبار کوتاه ربات های نرم و کمکی در نیمه ی نخست سال۱۳۹۸
دستیابی به پمپ منعطف برای رباتیک نرم و ساخت عضلات مصنوعی
مدارهای دیجیتال نرم جایگزین مدارهای الکترونیکی سخت در ربات ها
منبع: robohub
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


