پژوهشگران کره جنوبی یک ربات نرم پوشیدنی توسعه دادند که به بیماران مبتلا به نقص حرکتی دست کمک میکند تا بتوانند اشیا را در دست بگیرند. این پژوهشگران روش جدیدی بر مبنای الگوریتم یادگیری ماشین برای پیشبینی قصد کاربر طراحی کردند. الگوریتم یادگیری ماشین با مشاهده حرکات دست کاربر و تعامل کف دست و انگشتان با اشیاء قصد کاربر را پیشبینی میکند و از آن برای تحریک دستکش رباتیک استفاده میکند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
پروفسور Sungho Jo از مؤسسه علم و فناوری پیشرفته کره و Kyu-Jin Cho از دانشگاه ملی سئول و یک گروه پژوهشی در مرکز تحقیقات رباتیک نرم (SRRC)، سئول، کره، روشی جدید برای تشخیص قصد کاربر و استفاده از آن در رباتهای پوشیدنی ارائه دادند. روش پیشنهادی قصد چنگ زدن یا باز کردن دست را بر اساس رفتارهای کاربر پیشبینی میکند. و بیماران با آسیب طناب نخاعی (SCI) را در بازیابی توانایی دست و برداشتن و جایگذاری اشیاء یاری میدهد.
آنها یک روش مبتنی بر الگوریتم یادگیری ماشین طراحی کردهاند که با استفاده از یک دوربین اول شخص، نیت کاربر را برای رباتهای پوشیدنی پیشبینی میکند. اهداف کاربر از طریق جمعآوری رفتارهای دست و تعامل کف دست و انگشتان با اشیاء به دست میآید.
یک بیمار آسیب نخاعی با پوشیدن دستکش رباتیک Exo-Glove Poly II با موفقیت اشیای مختلف را در دست گرفته و دوباره آنها را در جای خود قرار داد. و فعالیتهای ضروری زندگی روزمره همچون نوشیدن قهوه را بدون هیچ کمک اضافی انجام داد. به این ترتیب که قصد کاربر بدون نیاز به کالیبراسیون و اقدامات اضافی تشخیص داده میشود، بسیار سودمند است. این ویژگی دستکش رباتیک را قادر میسازد تا به صورت یکپارچه با انسانها ارتباط برقرار کند.
این سامانه چگونه کار میکند؟
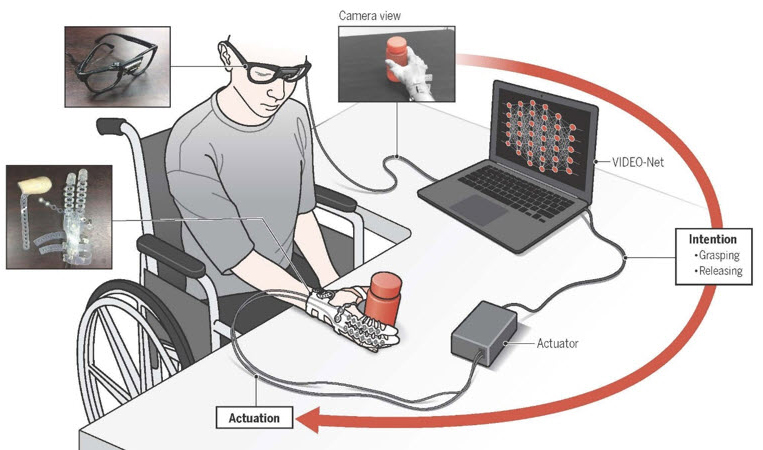
این فناوری در تلاش است تا قصد کاربر را با استفاده از یک دوربین دید اول شخص که بر روی عینک قرار میگیرد، پیشبینی کند. به طور ویژه قصد کاربر برای در دست گرفتن یا آزاد کردن اشیاء. VIDEONet، یک الگوریتم مبتنی بر یادگیری عمیق است که برای پیشبینی قصد کاربر با استفاده از دوربین و مشاهده رفتار دست کاربر و تعامل دست با اشیاء طراحی شده است. در اینجا به جای استفاده از سیگنالهای حیاتی، که اغلب برای شناسایی قصد افراد معلول استفاده میشود، از یک دوربین ساده برای تشخیص قصد کاربر استفاده شده است. قصد کاربر برای در دست گرفتن اشیا و چنگ زدن با مشاهده حرکت دست و فاصله از جسم تفسیر و پیشبینی میشود.
چه افرادی از مزایای این فناوری بهرهمند میشوند؟
همانطور که پیش از این ذکر شد، این فناوری قصد کاربر را از روی رفتارهای دست و تعاملات دست و اشیاء تشخیص میدهد. این فناوری را میتوان برای هر فردی که توانایی حرکت دست خود را از دست داده است، بکار برد. بیمارانی همچون آسیب نخاعی، سکته مغزی، فلج مغزی و یا هرگونه آسیب دیگر.
محدودیتها و کارهای آینده چه هستند؟
بیشتر محدودیتها مربوط به نقایص استفاده از یک دوربین چند منظوره است. برای نمونه، اگر یک شیء هدف توسط شیء دیگری پوشیده شده باشد، عملکرد این فناوری کاهش مییابد. همچنین اگر حالت دست کاربر توسط دوربین قابل مشاهده نباشد، این فناوری قابل استفاده نیست. برای غلبه بر این مشکلات، الگوریتم نیاز به اطلاعات حسگرها یا سایر روشهای موجود برای تشخیص قصد کاربر همچون استفاده از یک حسگر الکترومیوگرافی یا ردیابی چشم دارد.
برای استفاده از این فناوری در زندگی روزمره، چه چیزی نیاز است؟
برای اینکه این فناوری در زندگی روزمره مورد استفاده قرار گیرد، این دستگاهها مورد نیاز هستند: یک دستکش رباتیک قابل حمل با یک ماژول محرک، یک دستگاه محاسباتی و یک عینک با دوربین نصب شده روی آن. هدف کاهش اندازه و وزن دستگاه محاسبات است تا ربات بتواند در زندگی روزمره قابل استفاده باشد.
در همین زمینه بخوانید:
>>این دستکش رباتیک میتواند عملکرد دست بیماران آسیب نخاعی را بازگرداند
>>بهینه سازی عملکرد ربات های پوشیدنی با الگوریتم یادگیری ماشین
>>Ironhand: نخستین سامانه رباتیک تقویت کننده عضلات
منبع: eurekalert
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


