حسگرهای IMES کاشته شده داخل بدن
جالب است بدانید که تا همین امروز بیشتر اندامهای مصنوعی پرکاربرد از فناوریهای پایان جنگ جهانی دوم استفاده میکنند. این اندامهای مصنوعی (و از جمله بازوی splithook که یکی از پرکاربردترین آنهاست) قابلیت اطمینان بالا و کارایی خوبی دارند. اما نسبت به یک دست طبیعی محدودیتهای حرکتی و کارکردی بسیاری دارند. برای حل این مشکل مدتهاست که هدف پژوهشگران به کار بردن سیگنالهای طبیعی بدن برای کنترل یک اندام مصنوعی فعال از طریق استفاده از میزان فعالیت الکتریکی ماهیچهها یا عصبهای باقیمانده از عضو قطع شده است.
یک راه برای انجام دادن این کار استفاده از الکترودهای سطحی برای جمع آوری دادههای EMG ماهیچهها از روی پوست است. البته استفاده از سیگنالهای EMG سطحی (Surface EMG یا به اختصار SEMG) برای کنترل اندامهای مصنوعی به خاطر مشکلات زیادی که از گذشته داشته کنار گذاشته شده است؛ مشکلاتی مانند عدم اطمینان به الکترودهای SEMG به خاطر حرکتهای ناخواسته، قطع شدن سیمها، راحت نبودن عمل وصل کردن و برداشتن الکترودها، لزوم نگهداری و رعایت بهداشت پوست برای حفظ شرایط مطلوب و دردسرهای جایگزین کردن الکترودها. افزون بر این دستیابی به بیش از دو یا سه درجۀ آزادی برای اندام مصنوعی با این حسگرها بسیار دشوار است.
به همین خاطر دستهای مصنوعی الکتریکی امروزی از کنترل SEMG تنها برای یک درجۀ آزادی (باز کردن و بستن) استفاده میکنند. بازوهای مصنوعی کنونی که نیاز به کنترل چندین درجۀ آزادی دارند معمولاً از کنترل ترتیبی (sequential control) بهره میبرند. با آنکه روشهای رباتیک امروزی ادعای آن را دارند که میتوانند ظرافتهای حرکت اندامهای طبیعی را به اندامهای مصنوعی بدهند اما یکی از مهمترین عوامل محدود کنندۀ ساخت دستها و بازوهای پیچیدهتر، دشواری یافتن منابع زیستی کنترل پایدار برای کنترل درجه های آزادی متعددی است که یک دست طبیعی به صورت طبیعی آنها را داراست.
حسگرهای مایوالکتریک کاشتنی (IMES)
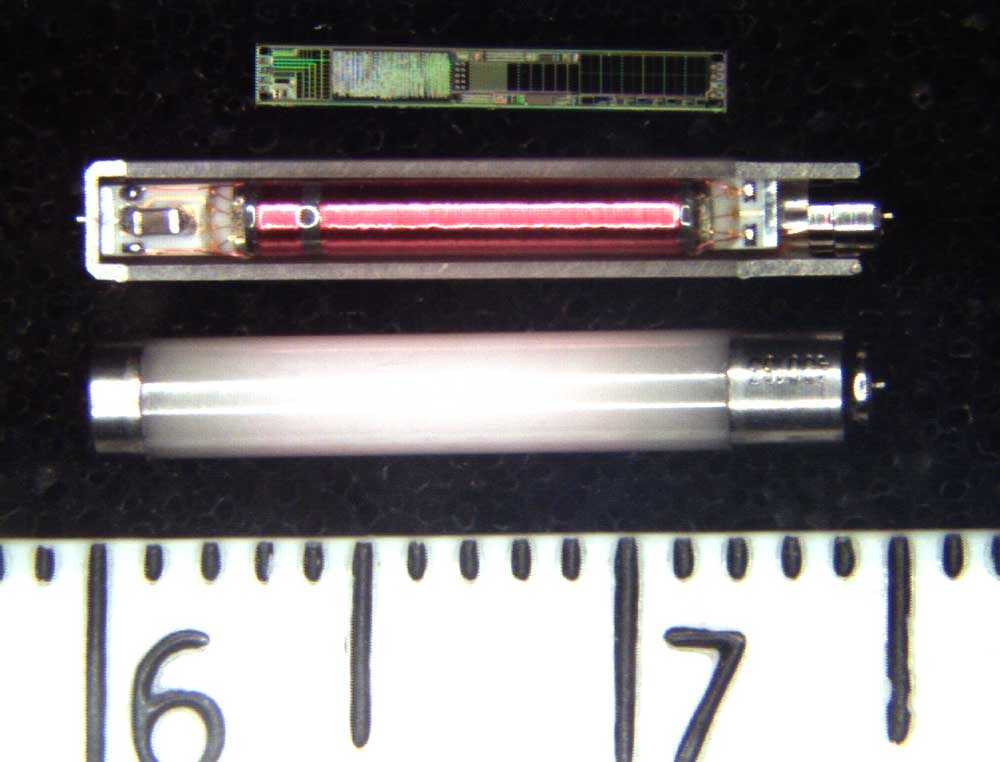
اندازۀ حسگرهای IMES
در قالب یک پروژۀ دانشگاهی شامل دانشگاه Northwestern، مؤسسۀ فناوری Illinois، مؤسسۀ توانبخشی شیکاگو، بنیاد Alfred Mann (AFM)، دانشگاه Colorado و شرکت Sigenics یک سامانۀ کنترل پروتزی با استفاده از حسگرهای مایوالکتریک کاشتنی (به اختصار IMES) ساخته شده است. این سامانه شامل چندین حسگر EMG یک کاناله است و سیگنالهای کنترلی لازم را برای کنترل اندامهای مصنوعی فراهم میکند. سیگنالهای EMG تولید شده از سوی ماهیچههای باقیمانده از عضو قطع شده در حسگرهای کاشته شده تقویت شده و به مقادیر دیجیتال تبدیل میشوند. یک کنترلگر راه دور (Telemetry Controller و به اختصار TC) که داخل عضو مصنوعی قرار دارد وظیفۀ تغذیه، زمانبندی و تنظیم عملکرد حسگرها را برای جلوگیری از تداخل آنها بر عهده دارد. هر حسگر IMES به شکل بیسیم توان لازم را دریافت کرده و به شکل بیسیم نیز سیگنال را میفرستد. دستگاه TC سیگنالهای EMG دریافتی را رمزگشایی میکند و اطلاعات EMG را به شکل چند کاناله به کنترلگر اندام مصنوعی میفرستد.
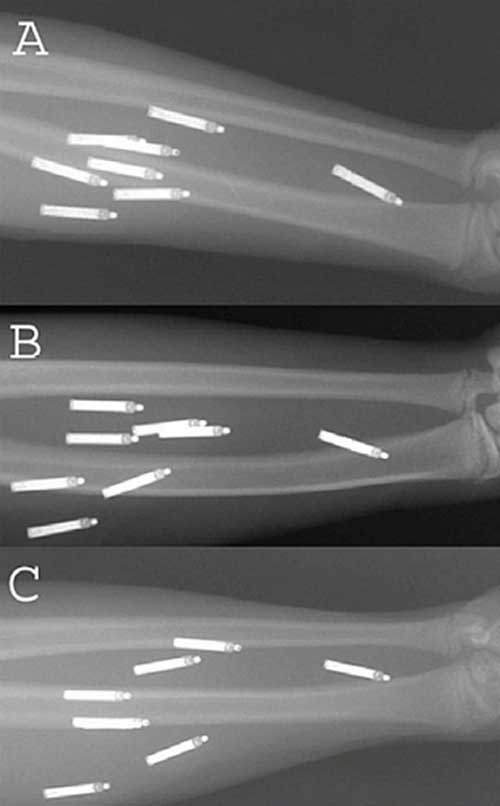
در این پروژه به کمک سامانۀ IMES یک واسط کنترلی ساخته شده است که میتواند سیگنالهای ایزوله و متمرکز شده را به شکل همزمان از چندین منبع ماهیچهای دریافت و ضبط کند. با قرار دادن IMES در ماهیچههای مجزا میتوان این نقاط را به عنوان نقاط کنترل با کمترین تداخل با یکدیگر در نظر گرفت. سیگنالهای IMES پایدار و مقاوم هستند زیر بافت در هم تنیده شدۀ ماهیچهها دستگاه را در جای خود محکم نگه میدارد و حسگر از حرکتهای ماهیچهها تأثیری نمیپذیرد.
سامانۀ IMES چگونه کار میکند؟
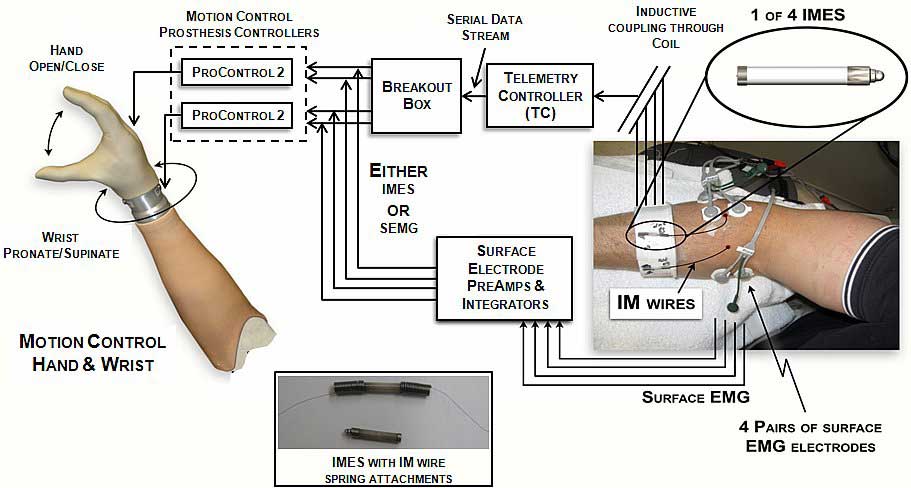
ساختار سامانۀ IMES
سامانۀ IMES برای حس کردن از دستهای از ماژولهای کاشتنی مجزا استفاده میکند که میتوانند سیگنالهای میان-ماهیچهای EMG را به شکل بیسیم به یک کنترلگر راه دور که بیرون از بدن قرار دارد بفرستند.
کنترلگر راه دور (TC) هم به عنوان منبع انرژی و هم به عنوان دریافت کنندۀ سیگنالهای دیجیتالی EMG حسگرهای کاشتنی IMES عمل میکند. میتوان با زمانبندی مناسب میان حسگرها از آنها در یک بخش از باقیماندۀ یک عضو قطع شده استفاده کرد. با یک TC میتوان تا ۳۲ حسگر کاشتنی IMES را کنترل کرد. هر حسگر در بازۀ زمانی مشخصی اطلاعات را به کنترلگر میفرستد. همچنین برای حسگر میتوان به طور مجزا بهرۀ توان، پهنای باند و نرخ نمونه برداری سیگنال EMG را تنظیم کرد. ارسال دادههای EMG به دو شکل باند کامل (full bandwidth) [دادۀ خام] بر روی حامل ۶٫۷۸MHz (باند ۲) یا ترکیب EMG بر روی حامل ۶۰KHz (باند ۱) امکانپذیر است.
حسگرهای IMES از نظر فیزیکی شبیه به سایر دستگاههای AMF ساخته میشوند. بخشهایی مانند قطعههای الکتریکی، بستر و سیم پیچهای رسانا در یک ساختار لولهای شکل سرامیکی جای میگیرند. عمر مفید این حسگر کاشتنی بیش از ۸۰ سال برآورد شده است.
برای مطالعۀ بیشتر اینجا را ببینید.